Command Palette
Search for a command to run...
TwinBrainVLA:非対称Mixture-of-Transformersを活用した汎用VLMの能力を体現型タスクに解放する
TwinBrainVLA:非対称Mixture-of-Transformersを活用した汎用VLMの能力を体現型タスクに解放する
概要
標準的な視覚-言語-行動(VLA)モデルは、ロボット制御のためにモノリシックな視覚-言語モデル(VLM)バックボーンを明示的に微調整する。しかし、このアプローチは、高レベルの汎用的意味理解を維持する必要性と、低レベルの細粒度センサモータ制御スキルを学習する必要との間に根本的な矛盾を生じさせ、モデルのオープンワールド能力が「悲劇的な忘却(catastrophic forgetting)」を引き起こすことがしばしばある。この矛盾を解決するため、本研究ではTwinBrainVLAと呼ばれる新規アーキテクチャを提案する。このアーキテクチャは、汎用的な意味理解能力を保持する一般化VLMと、身体化された本体感覚(embodied proprioception)に特化した専門VLMを協調的に統合し、共同でロボット制御を実現する。TwinBrainVLAは、固定された「左脳(Left Brain)」と、学習可能な「右脳(Right Brain)」の二重構造を採用し、新たな非対称トランスフォーマー混合(Asymmetric Mixture-of-Transformers, AsyMoT)機構により両者を連携させる。この設計により、右脳は固定された左脳から動的に意味知識を照会し、それを本体感覚状態と融合することで、連続的な制御を生成する「フロー・マッチング行動エキスパート(Flow-Matching Action Expert)」に豊かな条件付けを提供する。SimplerEnvおよびRoboCasaベンチマークにおける広範な実験により、TwinBrainVLAは最先端のベースラインと比較して優れた操作性能を達成するとともに、事前学習済みVLMの包括的な視覚理解能力を明示的に保持していることが確認された。本研究は、高レベルの意味理解と低レベルの物理的機敏性を同時に実現する汎用ロボットの構築に向けた有望な道筋を示している。
One-sentence Summary
Researchers from HIT, ZGCA, and collaborators propose TwinBrainVLA, a dual-brain VLA architecture using AsyMoT to fuse frozen semantic understanding with trainable proprioception, enabling robots to master precise control without forgetting open-world vision, validated on SimplerEnv and RoboCasa.
Key Contributions
- TwinBrainVLA introduces a dual-stream VLA architecture that decouples general semantic understanding (frozen Left Brain) from embodied perception (trainable Right Brain), resolving the catastrophic forgetting caused by fine-tuning monolithic VLMs for robotic control.
- It employs an Asymmetric Mixture-of-Transformers (AsyMoT) mechanism to enable dynamic cross-stream attention between the two VLM pathways, allowing the Right Brain to fuse proprioceptive states with semantic knowledge from the Left Brain for precise action generation.
- Evaluated on SimplerEnv and RoboCasa, TwinBrainVLA outperforms state-of-the-art baselines in manipulation tasks while preserving the pre-trained VLM’s open-world visual understanding, validating its effectiveness for general-purpose robotic control.
Introduction
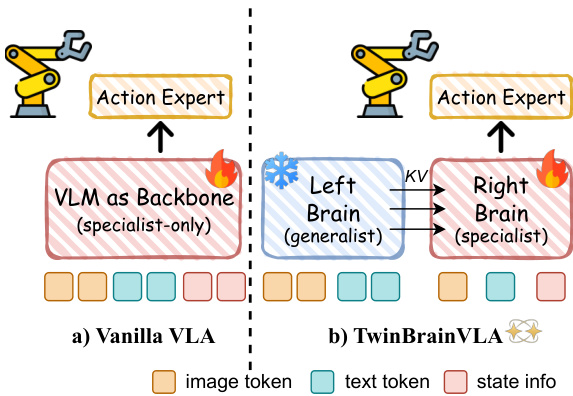
The authors leverage a dual-brain architecture to resolve the core conflict in Vision-Language-Action (VLA) models: the trade-off between preserving general semantic understanding and acquiring precise sensorimotor control. Prior VLA approaches fine-tune a single VLM backbone for robotics, which often causes catastrophic forgetting of open-world capabilities—undermining the very generalization they aim to exploit. TwinBrainVLA introduces an asymmetric design with a frozen “Left Brain” for semantic reasoning and a trainable “Right Brain” for embodied perception, fused via a novel Asymmetric Mixture-of-Transformers (AsyMoT) mechanism. This enables the system to generate accurate continuous actions while explicitly retaining the pre-trained VLM’s broad visual and linguistic understanding, validated across SimplerEnv and RoboCasa benchmarks.
Method
The authors leverage a dual-stream architecture to disentangle high-level semantic reasoning from fine-grained sensorimotor control, addressing the challenge of catastrophic forgetting in vision-language models for embodied tasks. The framework, named TwinBrainVLA, consists of two distinct pathways: a frozen "Left Brain" and a trainable "Right Brain," which interact through a novel Asymmetric Mixture-of-Transformers (AsyMoT) mechanism. The Left Brain functions as a generalist, preserving open-world visual-linguistic knowledge, while the Right Brain specializes in embodied motor control, integrating visual, textual, and proprioceptive inputs. This separation enables the model to maintain general semantic capabilities while allowing the control stream to adapt to specific robotic tasks without interference.
As shown in the figure below, the overall architecture of TwinBrainVLA features an asymmetric dual-stream design. The Left Brain processes only visual and textual inputs, receiving a sequence of image and text tokens derived from the vision encoder V(I) and text tokenizer T(T). This stream remains frozen during training, ensuring that its pre-trained semantic knowledge is preserved. In contrast, the Right Brain processes a multimodal input sequence that includes visual tokens, text tokens, and a projection of the robot's proprioceptive state s, encoded by a lightweight MLP state encoder ϕ. This design allows the Right Brain to ground its reasoning in the robot's physical configuration, a critical requirement for closed-loop control.
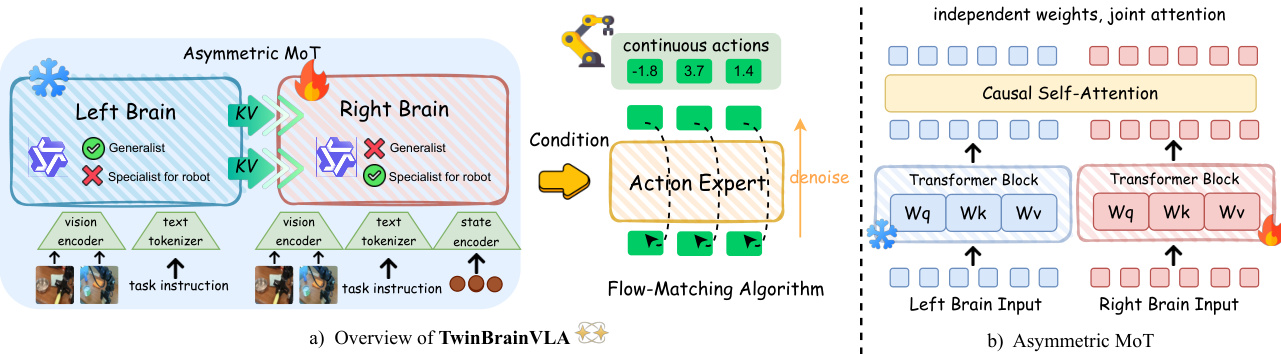
The core innovation lies in the AsyMoT mechanism, which enables the Right Brain to attend to the frozen key-value (KV) pairs of the Left Brain while maintaining its own trainable parameters. At each layer, the Left Brain computes its hidden states independently using its frozen self-attention mechanism. The Right Brain, however, employs an asymmetric joint attention mechanism where its query QR attends to a concatenated key and value set formed by the Left Brain's KV pairs (with stop-gradient applied) and its own KV pairs. This asymmetric flow ensures that the Right Brain can leverage high-level semantic features from the Left Brain without corrupting them, establishing a strict hierarchy where the Left Brain acts as a stable semantic anchor.
The final hidden states of the Right Brain, HRfinal, are passed to an Action Expert, which generates continuous robotic actions. The Action Expert is a Diffusion Transformer (DiT) architecture trained via a flow-matching objective. It operates as a conditional decoder that denoises a noisy action trajectory, conditioned on the Right Brain's representations. The flow-matching loss is defined as the expected squared error between the DiT's predicted vector field and the straight-line target vector field from a standard Gaussian prior to the ground-truth action distribution. During inference, actions are synthesized by solving the corresponding ordinary differential equation.
The training strategy is designed to preserve the generalist capabilities of the Left Brain. The total loss is solely the flow-matching loss, minimizing the discrepancy between the generated and ground-truth actions. The optimization is constrained by an asymmetric update rule: gradients are blocked at the AsyMoT fusion layer, preventing any backpropagation into the Left Brain's parameters. This ensures that the Right Brain and the state encoder can specialize in control dynamics, while the frozen Left Brain implicitly safeguards the model's general semantic priors.
Experiment
- Evaluated TwinBrainVLA on SimplerEnv and RoboCasa simulation benchmarks using 16× H100 GPUs under starVLA framework; training followed default protocols for fair comparison.
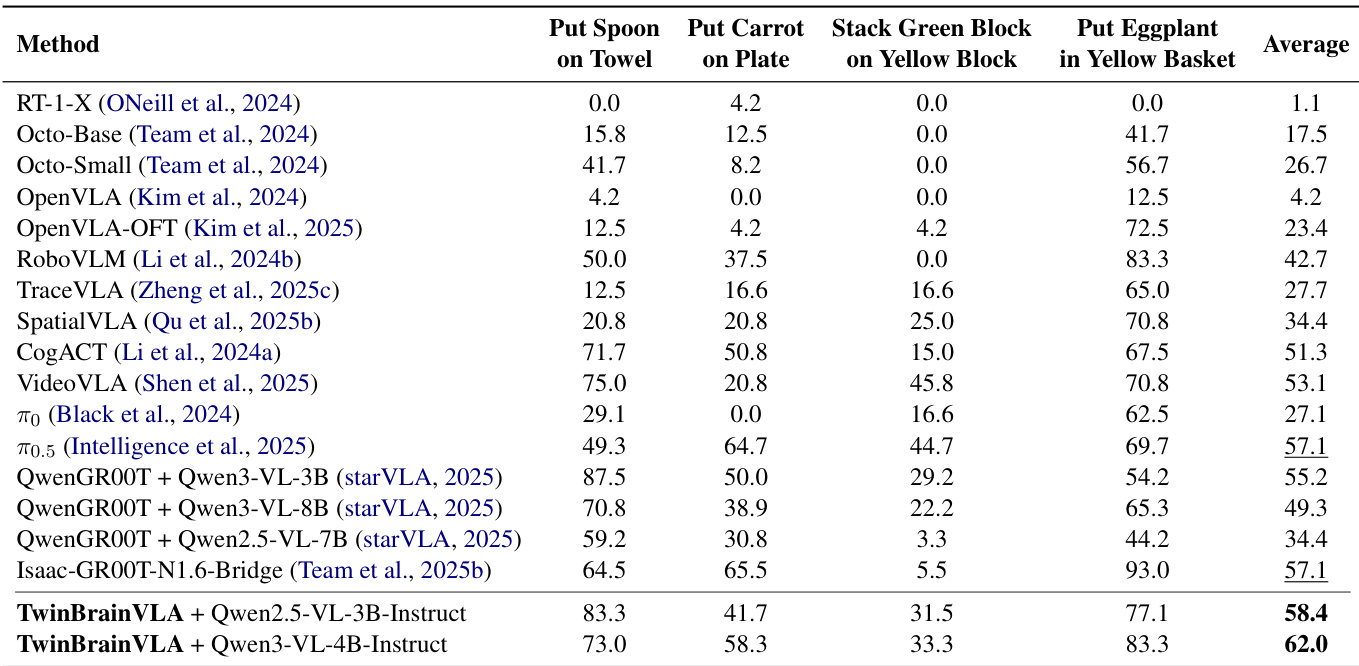
- On SimplerEnv with WidowX robot, TwinBrainVLA (Qwen3-VL-4B-Instruct) achieved 62.0% success rate across 4 tasks, surpassing Isaac-GR00T-N1.6 (57.1%) by +4.9%, validating asymmetric dual-brain design.
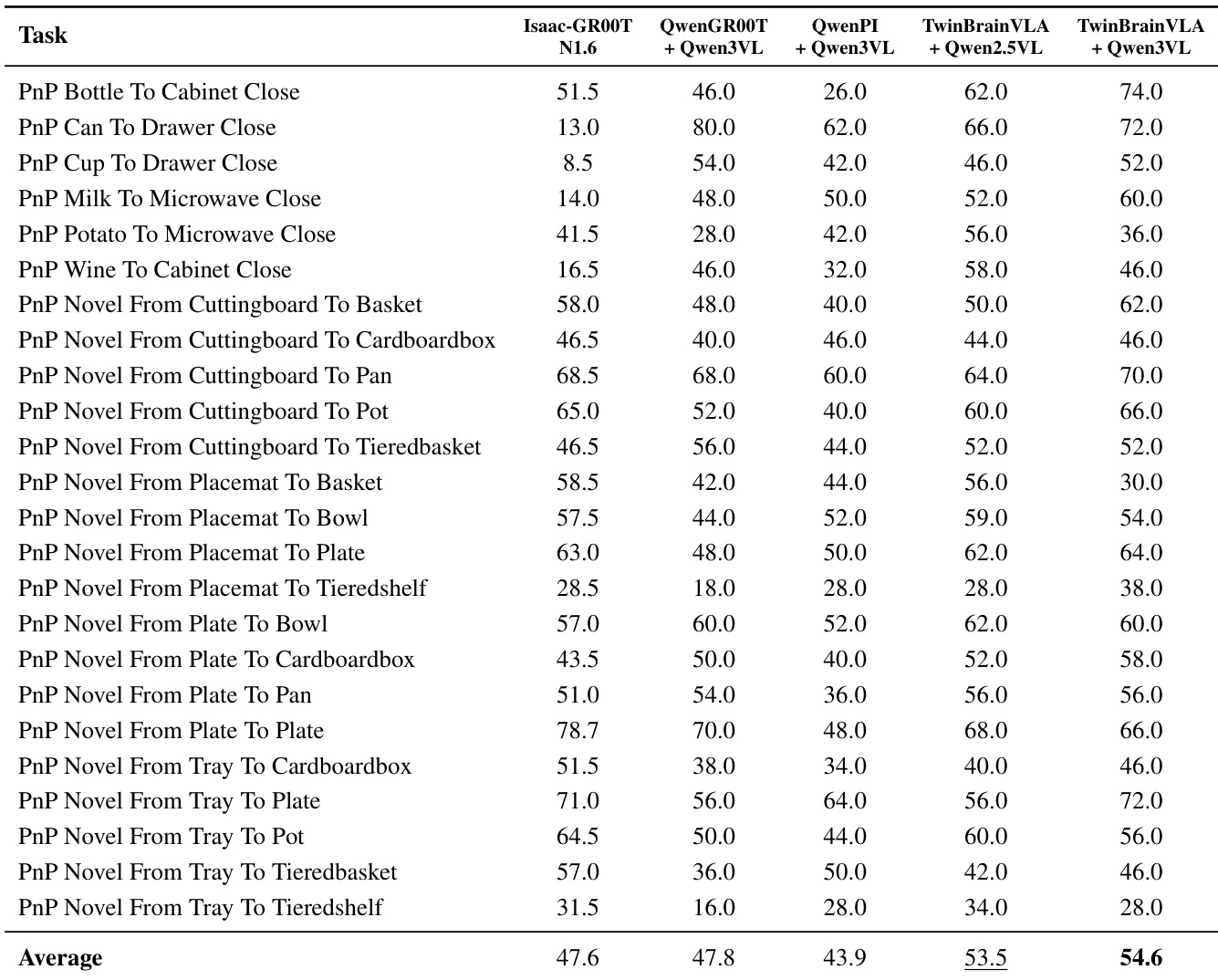
- On RoboCasa GR1 Tabletop Benchmark (24 tasks), TwinBrainVLA (Qwen3-VL-4B-Instruct) reached 54.6% Avg@50 success rate, outperforming Isaac-GR00T-N1.6 (47.6%) by +7.0%, QwenGR00T (47.8%) by +6.8%, and QwenPI (43.9%) by +10.7%.
- Model trained on Bridge-V2 and Fractal subsets of OXE dataset; uses AdamW, 40k steps, 1e-5 LR, DeepSpeed ZeRO-2, and gradient clipping; supports Qwen2.5-VL-3B and Qwen3-VL-4B backbones.
The authors use TwinBrainVLA with Qwen3-VL-4B-Instruct to achieve the highest average success rate of 54.6% on the RoboCasa GR1 Tabletop Benchmark, outperforming all baselines including Isaac-GR00T-N1.6 by 7.0 percentage points. Results show that the asymmetric dual-brain architecture enables superior performance in complex tabletop manipulation tasks compared to models trained with the same dataset and backbone.
The authors use TwinBrainVLA with Qwen2.5-VL-3B-Instruct and Qwen3-VL-4B-Instruct backbones to evaluate performance on SimplerEnv, achieving state-of-the-art results with success rates of 58.4% and 62.0% respectively. Results show that TwinBrainVLA surpasses the strongest baseline, Isaac-GR00T-N1.6, by +4.9% on average, demonstrating the effectiveness of its asymmetric dual-brain architecture in combining high-level semantic understanding with low-level robotic control.