Command Palette
Search for a command to run...
EllipseLIO : Odométrie LiDAR inertielle adaptative avec une représentation ellipsoïdale
EllipseLIO : Odométrie LiDAR inertielle adaptative avec une représentation ellipsoïdale
Rowan Border Margarita Chli
Résumé
L’odométrie inertielle LiDAR (LIO) est un composant critique pour de nombreux robots mobiles qui doivent naviguer sans dépendre de systèmes de positionnement externes (par exemple, le GPS). Les plateformes qui opèrent de manière autonome dans différents environnements et avec des capteurs LiDAR hétérogènes nécessitent une approche LIO capable de s’adapter à ces différents scénarios sans intervention humaine. Les approches LIO existantes peuvent généralement fournir une odométrie fiable et précise dans des scénarios présentant des environnements et des capteurs similaires, lorsqu’elles sont correctement calibrées. Cependant, de nombreuses approches peinent à maintenir une odométrie robuste à travers des environnements et des capteurs hétérogènes tout en utilisant une configuration constante. Cet article présente EllipseLIO, une approche LIO en temps réel qui généralise entre les scénarios en utilisant des méthodes de filtrage et d’enregistrement des scans LiDAR qui s’adaptent aux capacités du capteur et à l’environnement, sans nécessiter de réglage spécifique à chaque scénario. Des expériences menées avec EllipseLIO et des approches LIO de pointe sur cinq jeux de données présentant des scénarios divers et complexes démontrent qu’EllipseLIO est l’approche la plus performante dans l’ensemble. Elle présente une erreur d’odométrie moyenne inférieure de 38 % à celle de la deuxième meilleure approche et est la seule approche qui ne diverge dans aucune expérience. Une version open-source d’EllipseLIO sera disponible à l’adresse github.com/v4rl-ucy/ellipselio.
One-sentence Summary
EllipseLIO is a real-time LiDAR-inertial odometry system that employs an ellipsoid representation to adaptively filter and register scans according to sensor capabilities and environmental conditions without manual tuning, achieving the lowest average odometry error across five diverse datasets and outperforming the second-best approach by 38 percent while remaining the only method that avoids divergence in all experiments.
Key Contributions
- This paper introduces EllipseLIO, a real-time LiDAR inertial odometry framework that eliminates scenario-specific tuning by adapting to heterogeneous sensors and environments.
- The method utilizes adaptive LiDAR scan filtering and registration modules that dynamically adjust to sensor capabilities and environmental characteristics.
- Evaluation across five diverse datasets demonstrates that EllipseLIO achieves a 38% lower average odometry error than the second-best approach and remains the only evaluated method that avoids trajectory divergence in all tests.
Introduction
LiDAR inertial odometry (LIO) enables autonomous mobile robots to navigate in GPS-denied environments, making it a foundational technology for real-world deployment across diverse terrains and sensor configurations. Existing LIO systems typically deliver high accuracy only when manually calibrated to specific conditions, which limits their ability to maintain robust performance across heterogeneous environments using a single configuration. The authors leverage adaptive LiDAR scan filtering and registration techniques that automatically adjust to sensor capabilities and environmental changes. By eliminating the need for scenario-specific tuning, their approach consistently outperforms state-of-the-art methods, reducing average odometry error by 38 percent while maintaining stability across all tested scenarios.
Method
The authors leverage a modular architecture designed to deliver robust and adaptive odometry across diverse environments by integrating sensor data from LiDAR and IMU in a tightly coupled pipeline. The framework is structured into four main stages: preprocessing, odometry, mapping, and ellipsoid estimation, each contributing to the system's ability to adapt to varying sensor capabilities and environmental structures. The process begins with raw data acquisition from the IMU and LiDAR sensors, which are processed independently before being integrated. The preprocessing stage applies range-based filtering to the LiDAR scans, adjusting the downsampling resolution based on the distance from the sensor to maintain geometric fidelity while ensuring computational efficiency. This filtered data is then used to perform motion undistortion, compensating for sensor motion during the scan acquisition using high-frequency IMU state estimates.

Refer to the framework diagram to understand the overall flow. The odometry stage employs an iterated Extended Kalman Filter (iEKF) to estimate the sensor's state, with updates driven by scan-to-map registration. State predictions, derived from high-frequency IMU measurements, propagate the latest state forward and provide an initial estimate for the next update, as well as the transformation for motion undistortion. The scan registration process uses an ellipsoid-based error metric, where the error for each point match is adapted based on the local surface geometry represented by an ellipsoid associated with the map point. This adaptation allows the system to handle both structured and unstructured environments effectively, avoiding the limitations of fixed error metrics. The odometry pipeline also incorporates a drift correction mechanism, where point matches are adaptively weighted to prioritize those from older map points when the sensor revisits a previously observed location, thus correcting accumulated drift without requiring separate loop closure detection.
The mapping stage aggregates processed LiDAR scans into a globally consistent map using a dynamic iOctree data structure, which supports efficient point insertion and searching. This enables the real-time estimation of ellipsoids for each map point, representing the local surface geometry. The map update process varies the density of points added based on their distance from the sensor, ensuring that nearby points have a higher density and smaller ellipsoids to capture fine surface details, while distant points have lower density and larger ellipsoids. The ellipsoid estimation module, which is a core component of the system, computes surface geometry using the Tensor Voting (TV) method. It first computes an initial surface normal estimate for each point using a tensor derived from its neighbors, then propagates these estimates through tensor votes to obtain a final, weighted sum representing the local surface geometry. This process classifies each point's surface as a line, plane, or ball based on the eigenvalues of the final tensor, which are then used to define the ellipsoid axes and magnitudes, providing a high-fidelity representation of the underlying geometry. This ellipsoid representation is then used directly in the scan registration process to adapt the error metric for each point match, ensuring accurate alignment across diverse scenarios.
Experiment
EllipseLIO was evaluated across five diverse datasets spanning urban, natural, aerial, and aquatic environments to benchmark its odometry accuracy, environmental robustness, and computational efficiency against established LiDAR-inertial methods. The comparative experiments validate that its adaptive filtering and geometry-aware registration consistently prevent trajectory divergence and reduce drift across both constrained and open terrains. Ablation studies further confirm that each architectural component, particularly the adaptive match weighting and ellipsoid-based registration, is essential for maintaining stability and precision. Collectively, the results demonstrate that the system generalizes reliably across different sensors and scenarios without manual tuning, outperforming current approaches in both accuracy and consistency.
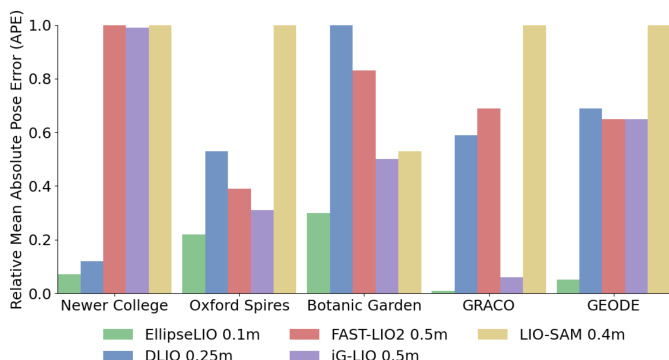
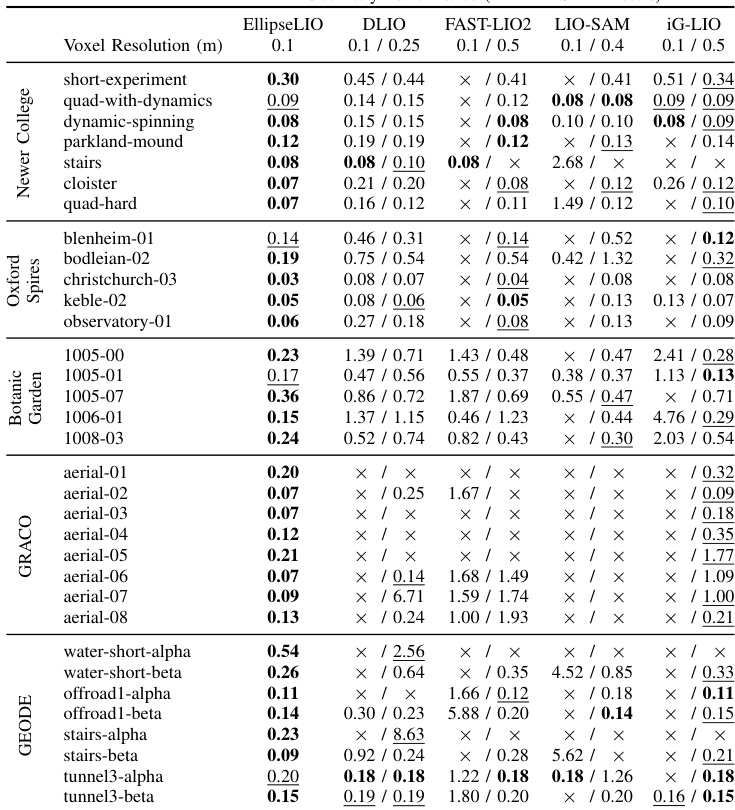
{"summary": "The authors evaluate EllipseLIO against state-of-the-art approaches on five diverse datasets, comparing odometry performance using relative mean absolute pose error. Results show that EllipseLIO consistently achieves the lowest or second-lowest error across all datasets and does not diverge, while other methods either diverge or exhibit higher errors, particularly in challenging environments. The approach demonstrates robustness through adaptive scan filtering and registration, maintaining performance across structured and unstructured scenes.", "highlights": ["EllipseLIO achieves the best or second-best odometry performance across all tested datasets without diverging.", "EllipseLIO outperforms compared approaches in both structured and unstructured environments, maintaining consistent accuracy.", "The method's adaptivity in scan filtering and registration enables reliable performance across diverse sensor and scene conditions."]
The authors compare EllipseLIO with state-of-the-art approaches using computational efficiency metrics. Results show that EllipseLIO achieves competitive computation times and memory usage while maintaining a finer map resolution. The approach outperforms others in runtime and memory efficiency relative to its resolution. EllipseLIO achieves competitive computation time and memory usage compared to state-of-the-art approaches. EllipseLIO uses less memory than DLIO while maintaining a finer map resolution. EllipseLIO's computation time is similar to DLIO but with better memory efficiency.

{"summary": "The authors evaluate EllipseLIO against state-of-the-art approaches on five diverse datasets, assessing odometry performance and computational efficiency. Results show that EllipseLIO consistently achieves the best or second-best performance across all sequences without divergence, while also maintaining real-time operation and lower memory usage compared to other methods. The approach demonstrates robustness in both structured and unstructured environments due to its adaptive scan filtering and registration mechanisms.", "highlights": ["EllipseLIO achieves the best or second-best odometry performance on all datasets without diverging, outperforming all compared approaches.", "EllipseLIO maintains real-time operation and uses less memory than other methods while creating a higher-resolution map.", "The approach demonstrates consistent performance across diverse environments due to adaptive scan filtering and registration, reducing drift in both structured and unstructured settings."]
The authors evaluate EllipseLIO against several state-of-the-art approaches on multiple datasets, demonstrating its superior performance and robustness. Results show that EllipseLIO consistently achieves the lowest or second-lowest odometry error and does not diverge across all sequences, while the compared methods fail in certain environments. Ablation studies confirm that each component of EllipseLIO contributes significantly to its overall performance. EllipseLIO achieves the best or second-best performance across all datasets without diverging, unlike other approaches. Removing adaptive match weighting significantly increases the relative mean APE, indicating its importance in drift correction. The range-based scan filtering component is critical, as its removal leads to a substantial increase in error and divergence in large-scale environments.
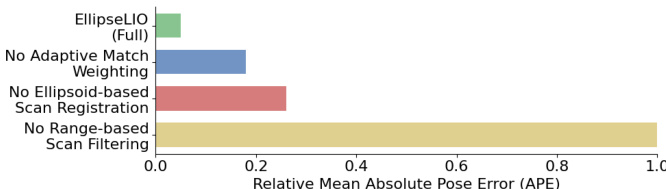
The authors evaluate EllipseLIO against state-of-the-art methods across five diverse datasets to validate its tracking accuracy, computational efficiency, and core algorithmic components. Comprehensive testing demonstrates that the system consistently delivers robust odometry performance without divergence, effectively adapting to both structured and unstructured environments through its adaptive filtering and registration mechanisms. Additionally, ablation studies confirm that adaptive match weighting and range-based filtering are critical for drift correction and large-scale stability, while the overall architecture sustains real-time operation and lower memory consumption without compromising map resolution.