Command Palette
Search for a command to run...
Ensemble De Données De Remappage Des Mouvements Globaux Des Robots OmniRetarget
Date
Taille
URL du document
Licence
MIT
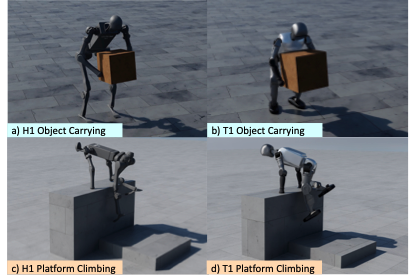
OmniRetarget est un jeu de données de trajectoire de haute qualité pour la reconfiguration des mouvements du corps entier des robots humanoïdes, publié en 2025 par Amazon, le MIT, l'Université de Californie à Berkeley et d'autres institutions. Les résultats de l'étude sont les suivants :OmniRetarget : Génération de données préservant les interactions pour la loco-manipulation du corps humain et l'interaction avec les scènes". Cet ensemble de données contient les trajectoires de mouvement du robot humanoïde G1 lors de ses interactions avec des objets et des terrains complexes, couvrant trois scénarios : transport d'objets, marche sur terrain et interaction mixte objet-terrain. En raison de restrictions de licence, l'ensemble de données public n'inclut pas la version remappée de LAFAN1. Il est divisé en trois sous-ensembles, totalisant environ quatre heures de données de trajectoires de mouvement. Sa composition spécifique est la suivante :
- robot-objet : La trajectoire du robot portant l'objet, dérivée des données OMOMO 3.0 ;
- robot-terrain : Trajectoire de mouvement du robot sur un terrain complexe, générée par MoCap interne, d'une durée d'environ 0,5 heure ;
- robot-objet-terrain : une piste de mouvement impliquant à la fois l'objet et le terrain, d'une durée d'environ 0,5 heure.
- De plus, l'ensemble de données contient également un répertoire de modèles, qui fournit des fichiers de modèles visuels aux formats URDF, SDF et OBJ pour l'affichage plutôt que pour la formation.
Les données de trajectoire de mouvement sont stockées au format .npz. Chaque trajectoire contient deux champs : la fréquence d'images (ips) et l'état du système (qpos).
Exemple d'ensemble de données
Citation
@inproceedings{Yang2025OmniRetarget,
title={OmniRetarget: Interaction-Preserving Data Generation for Humanoid Whole-Body Loco-Manipulation and Scene Interaction},
author={Yang, Lujie and Huang, Xiaoyu and Wu, Zhen and Kanazawa, Angjoo and Abbeel, Pieter and Sferrazza, Carmelo and Liu, C. Karen and Duan, Rocky and Shi, Guanya},
booktitle={arXiv},
year={2025}
}
Créer de l'IA avec l'IA
De l'idée au lancement — accélérez votre développement IA avec le co-codage IA gratuit, un environnement prêt à l'emploi et le meilleur prix pour les GPU.