Command Palette
Search for a command to run...
Ensemble De Données De Perception De l'environnement Gibson
Date
Organisation
URL de publication
URL du document
Licence
Non-Commercial
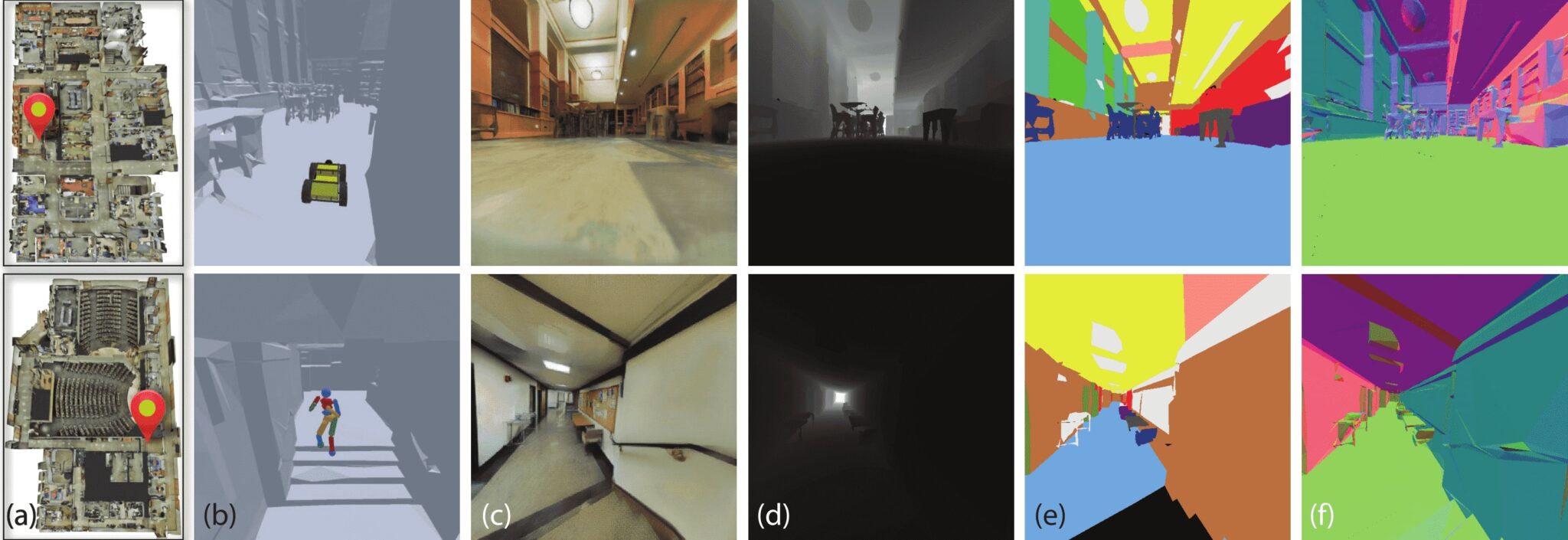
L'environnement Gibson est un ensemble de données de perception et de simulation open source. L'ensemble de données est utilisé pour explorer l'initiative et la perception du monde réel par le robot, et pour effectuer un apprentissage perceptif du monde réel. L'ensemble de données est basé sur un espace réel virtualisé plutôt que sur un espace conçu artificiellement. L'ensemble de données contient plus de 1 400 surfaces de plancher de 572 bâtiments complets. Les principales caractéristiques de cet ensemble de données sont les suivantes : I. Il provient du monde réel et reflète sa complexité sémantique ; II. Il dispose d'un mécanisme de synthèse interne « Goggles » qui permet le déploiement de modèles entraînés dans le monde réel sans autre adaptation de domaine ; III. Il met en œuvre des agents et les soumet à des contraintes physiques et spatiales.
Créer de l'IA avec l'IA
De l'idée au lancement — accélérez votre développement IA avec le co-codage IA gratuit, un environnement prêt à l'emploi et le meilleur prix pour les GPU.