Command Palette
Search for a command to run...
Ensemble De Données De Flux d'événements De Classification d'objets CIFAR10-DVS
Date
Taille
Organisation
URL de publication
URL du document
Licence
CC BY 4.0
Balises
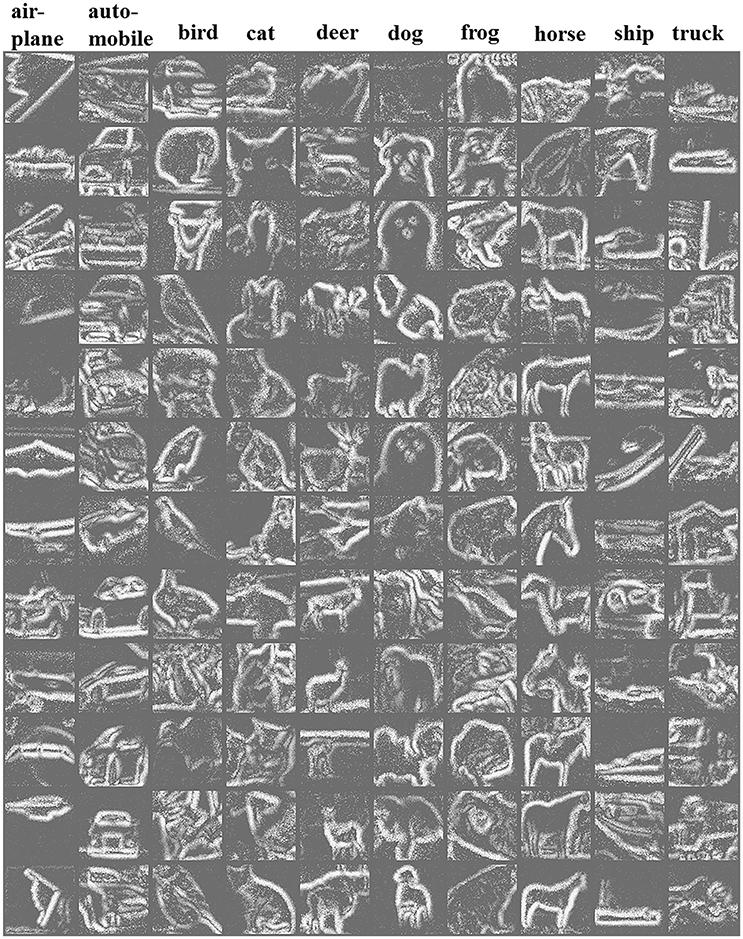
CIFAR signifie Instituts canadiens de recherche avancée, DVS signifie Dynamic Vision Sensor et CIFAR10-DVS est un ensemble de données de flux d'événements pour la classification d'objets. Cet ensemble de données comporte 10 catégories (avion, voiture, oiseau, chat, cerf, chien, grenouille, cheval, bateau, camion), un total de 10 000 flux d'événements et est de difficulté moyenne. Ces flux d'événements sont obtenus en transformant des images basées sur des trames dans l'ensemble de données CIFAR-10 via un capteur d'images basé sur des événements, en utilisant un mouvement de lissage en boucle fermée répétitif (RCLS) sur les images pour réaliser la transformation. En raison de la transformation, l'image produit de riches variations d'intensité locales en temps continu, qui sont quantifiées pixel par pixel par la caméra événementielle.
Créer de l'IA avec l'IA
De l'idée au lancement — accélérez votre développement IA avec le co-codage IA gratuit, un environnement prêt à l'emploi et le meilleur prix pour les GPU.