Command Palette
Search for a command to run...
Research on World Models Is Not Merely Injecting World Knowledge into Specific Tasks
Research on World Models Is Not Merely Injecting World Knowledge into Specific Tasks
Abstract
World models have emerged as a critical frontier in AI research, aiming to enhance large models by infusing them with physical dynamics and world knowledge. The core objective is to enable agents to understand, predict, and interact with complex environments. However, current research landscape remains fragmented, with approaches predominantly focused on injecting world knowledge into isolated tasks, such as visual prediction, 3D estimation, or symbol grounding, rather than establishing a unified definition or framework. While these task-specific integrations yield performance gains, they often lack the systematic coherence required for holistic world understanding. In this paper, we analyze the limitations of such fragmented approaches and propose a unified design specification for world models. We suggest that a robust world model should not be a loose collection of capabilities but a normative framework that integrally incorporates interaction, perception, symbolic reasoning, and spatial representation. This work aims to provide a structured perspective to guide future research toward more general, robust, and principled models of the world.
One-sentence Summary
The authors from multiple institutions propose a unified framework for world models, integrating interaction, perception, symbolic reasoning, and spatial representation to overcome fragmented task-specific approaches, aiming to guide AI toward more general and principled environmental understanding.
Key Contributions
- The paper identifies a critical fragmentation in current world model research, where methods focus on injecting world knowledge into isolated tasks like visual prediction or 3D estimation, leading to performance gains but lacking systematic coherence for holistic world understanding.
- It proposes a unified design specification for world models, defining them as normative frameworks that integrally combine interaction, perception, symbolic reasoning, and spatial representation to enable agents to actively understand and respond to complex environments.
- Through analysis of LLMs, video generation, and embodied AI systems, the work demonstrates the limitations of task-specific approaches and outlines essential components—Interaction, Reasoning, Memory, Environment, and Multimodal Generation—to guide future development toward general, robust world simulation.
Introduction
The authors leverage the growing interest in world models—systems designed to simulate physical dynamics and enable agents to interact intelligently with complex environments—to critique the current fragmented research landscape. Most existing approaches inject world knowledge into isolated tasks like video generation or 3D estimation, relying on task-specific data and fine-tuning, which yields short-term performance gains but fails to produce coherent, physics-aware understanding or long-term consistency. Their main contribution is a unified design specification for world models that integrates interaction, perception, reasoning, memory, and multimodal generation into a normative framework, aiming to guide future research toward general, robust, and principled models capable of active exploration and real-world adaptation.
Method
The authors leverage a unified world model framework designed to overcome the fragmentation of task-specific models by integrating perception, reasoning, memory, interaction, and generation into a cohesive, closed-loop architecture. This framework is structured around five core modules, each addressing a critical capability required for holistic world understanding and adaptive interaction.
The interaction module serves as the unified perceptual and operational interface between users, the environment, and the model. It accepts multimodal inputs—including text, images, video, audio, and 3D point clouds—and processes diverse operational signals such as natural language instructions, embodied commands, or low-level motion controls. As shown in the figure below, this module unifies the encoding and scheduling of heterogeneous data streams to produce structured input for downstream components.
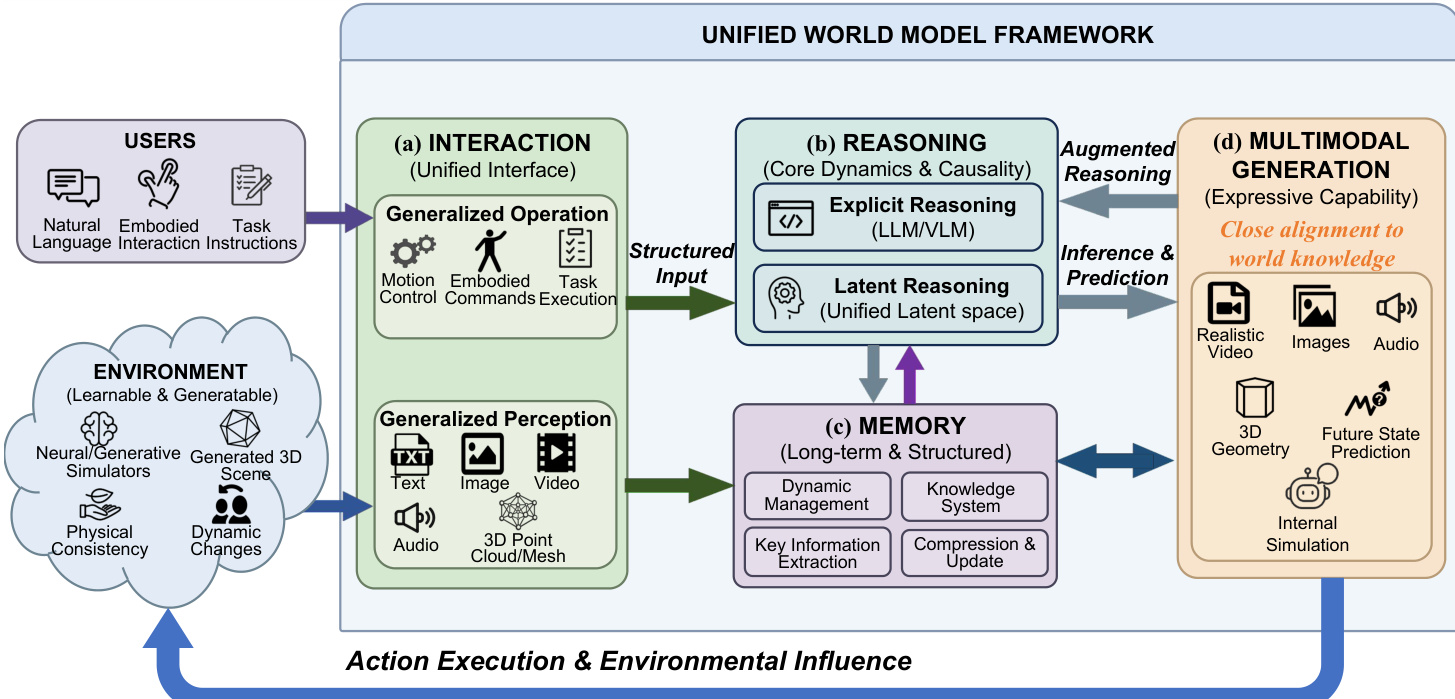
The reasoning module is responsible for inferring dynamics and causality from the structured inputs. It supports two complementary paradigms: explicit reasoning, which leverages LLMs/VLMs to generate textual reasoning chains for symbolic planning and physical law inference; and latent reasoning, which operates directly in a unified latent space to preserve sub-symbolic, continuous physical details. The module dynamically selects or combines these approaches based on task requirements, ensuring both interpretability and fidelity in complex scenarios.
Memory is implemented as a structured, dynamic knowledge system capable of managing multimodal, high-concurrency interaction streams. It extends beyond sequential storage by incorporating mechanisms for categorization, association, and fusion of experiential data. The memory module also performs key information extraction and compression to maintain efficiency, while continuously updating and purging redundant content to preserve relevance and timeliness.
The environment component is not merely a passive simulator but an active, learnable, and generative entity. It supports both physical and simulated interactions, with an emphasis on generative 3D scene synthesis and procedural content creation to bridge the sim-to-real gap. This enables training on near-infinite, physically consistent environments, enhancing the model’s generalization to open-world scenarios.
Finally, multimodal generation enables the model to synthesize realistic outputs—including video, images, audio, and 3D geometry—based on internal states and predictions. This capability is tightly coupled with reasoning and memory, forming a closed loop where generated content supports planning, self-augmentation, and verification of world understanding. For example, in navigation tasks, the model can generate a 3D scene from the agent’s perspective to simulate and validate its strategy before execution.
Together, these modules form a tightly integrated system that continuously perceives, reasons, remembers, acts, and generates, enabling robust, adaptive, and human-aligned interaction with complex, dynamic environments.