Command Palette
Search for a command to run...
Open X-Embodiment Real Robot Dataset
Date
Organization
Publish URL
Paper URL
* The dataset can be downloaded here.
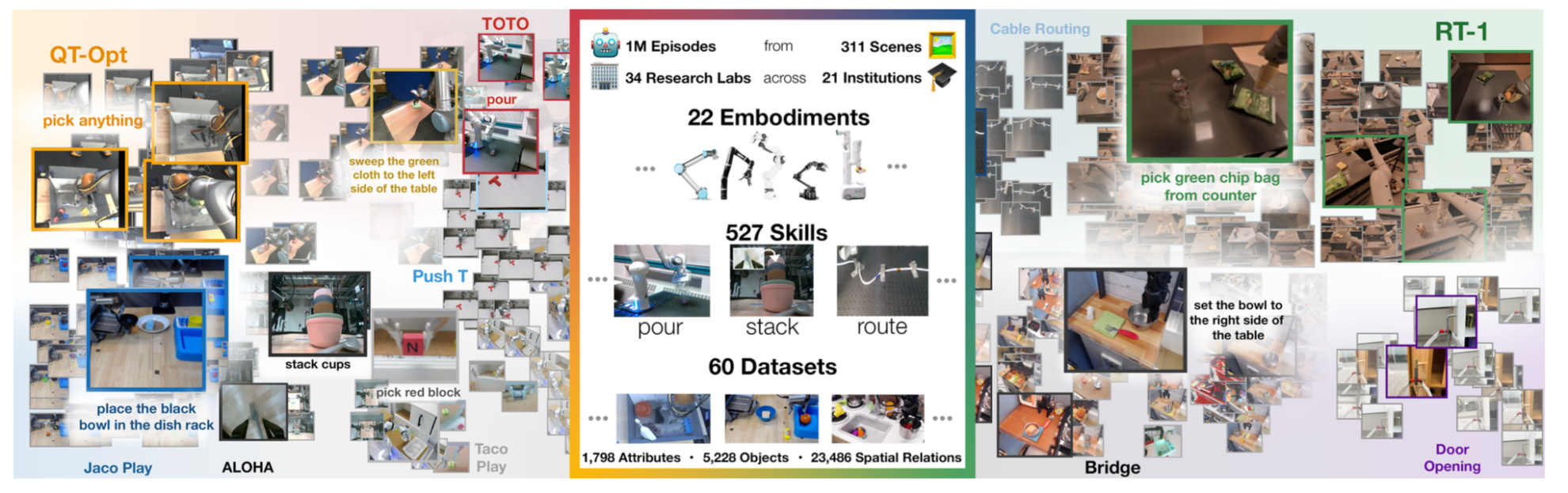
The Open X-Embodiment dataset is a large-scale open source real robot dataset project initiated by DeepMind in 2023 to promote general robot learning research. The dataset brings together data from 22 different robot types, from single-arm robots to two-handed robots and quadruped robots, collected by 21 different institutions, covering 527 different skills and 160,266 tasks. These data are provided in a unified RLDS format to facilitate subsequent research and application. It is built by bringing together 60 existing robot datasets from 34 robotics research laboratories around the world, showing a variety of robot tasks and environments.
The relevant paper results areOpen X-Embodiment: Robotic Learning Datasets and RT-X Models", first published in October 2023 and last revised in June 2024.
Build AI with AI
From idea to launch — accelerate your AI development with free AI co-coding, out-of-the-box environment and best price of GPUs.