Command Palette
Search for a command to run...
Gibson Environment Perception Dataset
Date
Organization
Publish URL
Paper URL
License
Non-Commercial
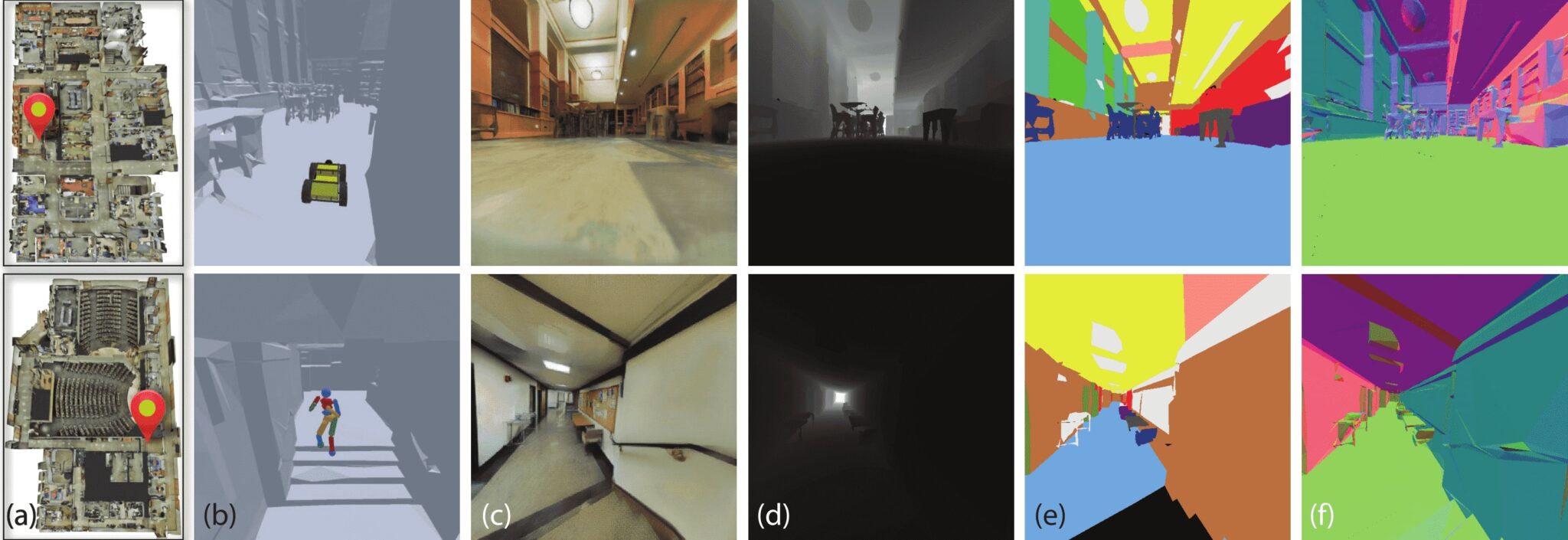
Gibson Environment is an open source perception and simulation dataset. The dataset is used to explore the robot's active and real-world perception and to learn perception of the real world. The dataset is based on virtualized real spaces rather than artificially designed spaces. The dataset contains more than 1,400 floor spaces in 572 complete buildings. The main features of this dataset are: I. It comes from the real world and reflects its semantic complexity; II. It has an internal synthesis mechanism "Goggles" that can deploy trained models in the real world without further domain adaptation; III. It implements agents and subjects them to physical and spatial constraints.
Build AI with AI
From idea to launch — accelerate your AI development with free AI co-coding, out-of-the-box environment and best price of GPUs.