Command Palette
Search for a command to run...
Gibson Environment Perception Dataset
Datum
Organisation
Veröffentlichungs-URL
Paper-URL
Lizenz
Non-Commercial
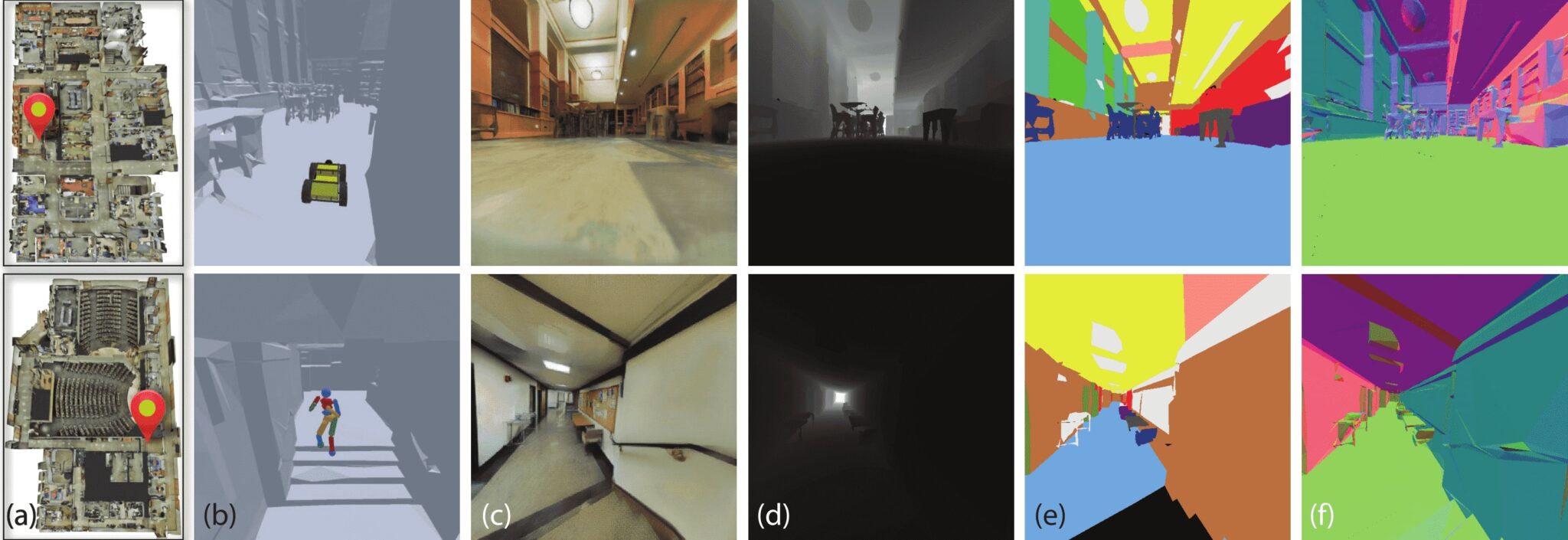
Die Gibson-Umgebung ist ein Open-Source-Datensatz für Wahrnehmung und Simulation. Der Datensatz wird verwendet, um die Initiative und Wahrnehmung der realen Welt durch den Roboter zu erforschen und ein Wahrnehmungslernen der realen Welt durchzuführen. Der Datensatz basiert auf einem virtualisierten realen Raum und nicht auf einem künstlich gestalteten Raum. Der Datensatz enthält über 1.400 Grundflächen von 572 kompletten Gebäuden. Die Hauptmerkmale dieses Datensatzes sind: I. Er stammt aus der realen Welt und spiegelt deren semantische Komplexität wider; II. Es verfügt über einen internen Synthesemechanismus „Goggles“, der den Einsatz trainierter Modelle in der realen Welt ohne weitere Domänenanpassung ermöglicht; III. Es implementiert Agenten und unterwirft sie physischen und räumlichen Einschränkungen.
KI mit KI entwickeln
Von der Idee bis zum Launch – beschleunigen Sie Ihre KI-Entwicklung mit kostenlosem KI-Co-Coding, sofort einsatzbereiter Umgebung und bestem GPU-Preis.