Command Palette
Search for a command to run...
ROCKET-2: لعبة ثلاثية الأبعاد Zero-Shot Transfer
التاريخ
الحجم
1016.39 MB
الوسوم
الترخيص
MIT
GitHub
رابط الورقة البحثية
1. مقدمة البرنامج التعليمي

ROCKET-2 هو إطار عمل للتحكم البصري في الحركة يعتمد على محاذاة الأهداف من زوايا رؤية متعددة، وقد أطلقه فريق CraftJarvis في 21 مارس 2025. يركز هذا الإطار على حلّ مشكلات التحكم المعقدة في مهام الروبوتات. ومن خلال تقنية مبتكرة لمحاذاة الأهداف من زوايا رؤية متعددة، يُحسّن هذا المشروع بشكل ملحوظ قدرة التعميم والتحكم في سياسات الحركة البصرية في البيئات الديناميكية. تتوفر أوراق بحثية ذات صلة. ROCKET-2: توجيه سياسة الحركة البصرية عبر محاذاة الهدف عبر الرؤية المتقاطعة .
يستخدم هذا البرنامج التعليمي بطاقة RTX 5090 واحدة كمورد.
2. أمثلة المشاريع

3. خطوات التشغيل
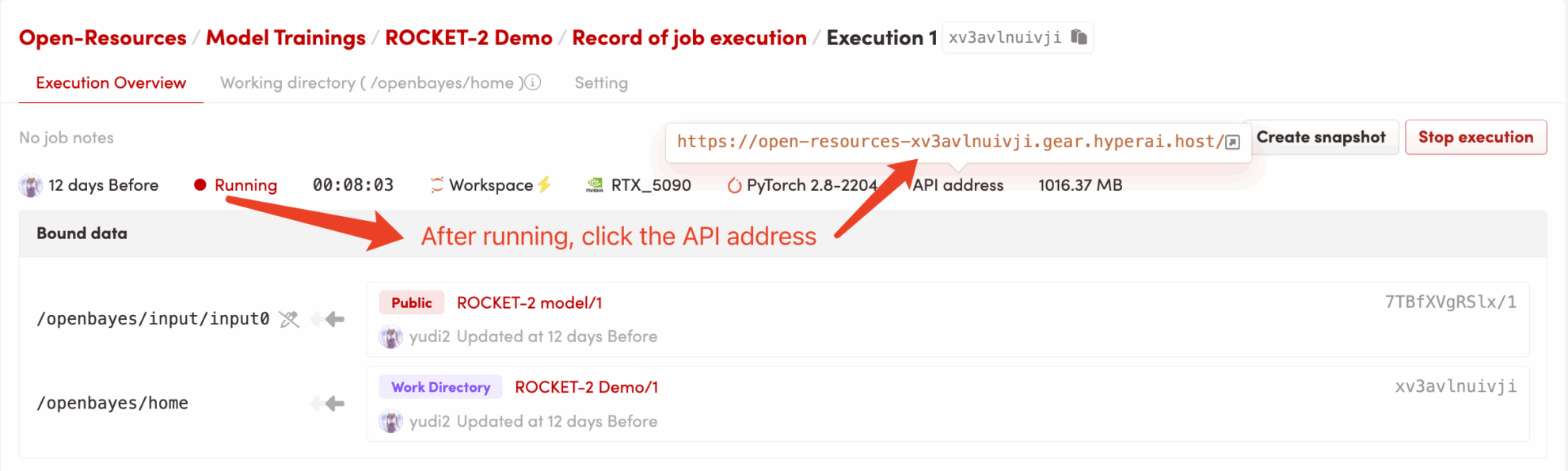
1. بعد بدء تشغيل الحاوية، انقر فوق عنوان API للدخول إلى واجهة الويب
إذا تم عرض "بوابة سيئة"، فهذا يعني أن النموذج قيد التهيئة. نظرًا لأن النموذج كبير الحجم، يرجى الانتظار لمدة 1-2 دقيقة وتحديث الصفحة.
2. بعد الدخول إلى صفحة الويب، يمكنك بدء محادثة مع النموذج
كيفية الاستخدام
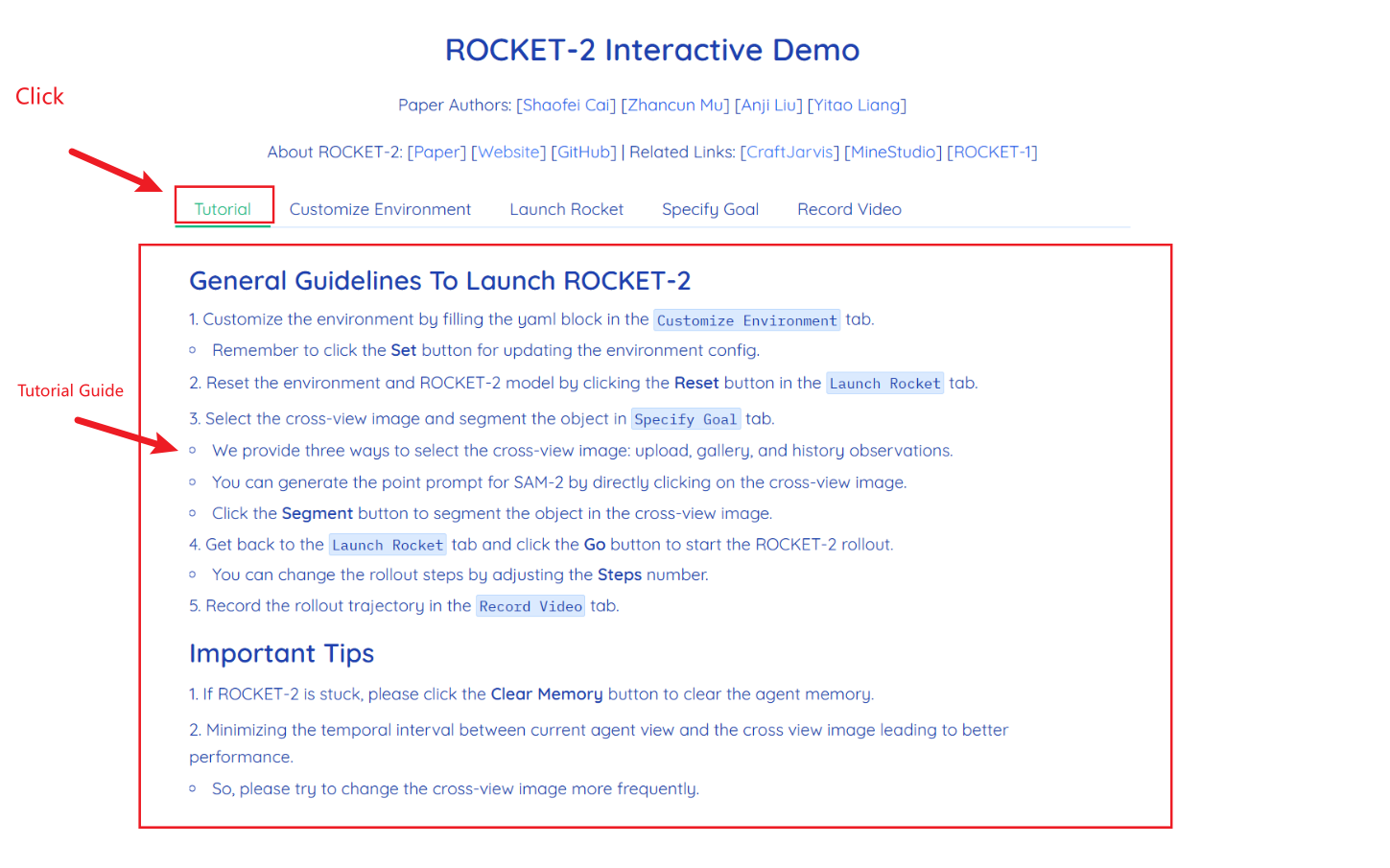
- انتقل إلى البرنامج التعليمي لعرض دليل البرنامج التعليمي
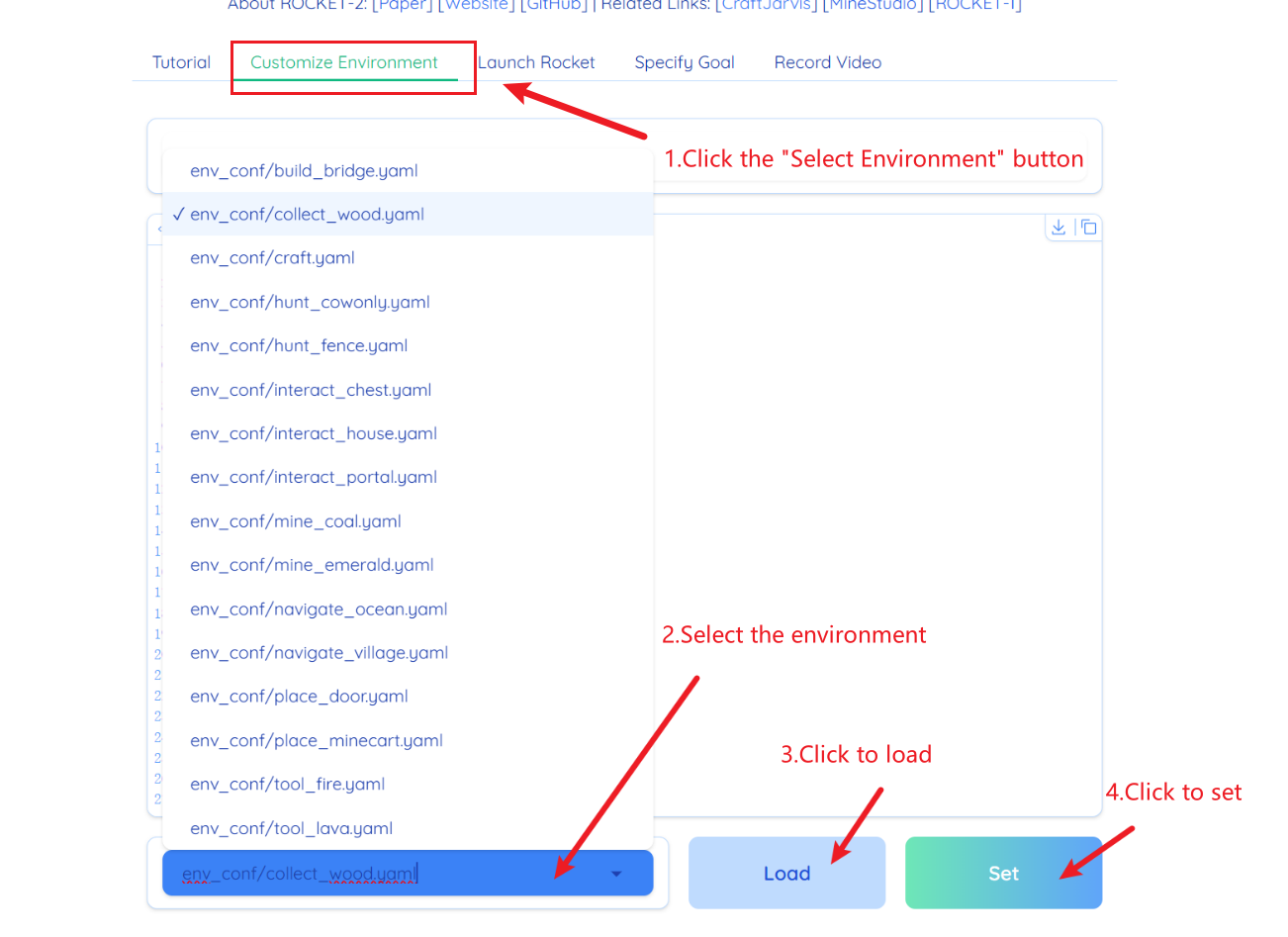
- أدخل تخصيص البيئة وحدد البيئة التي تريد تحميلها
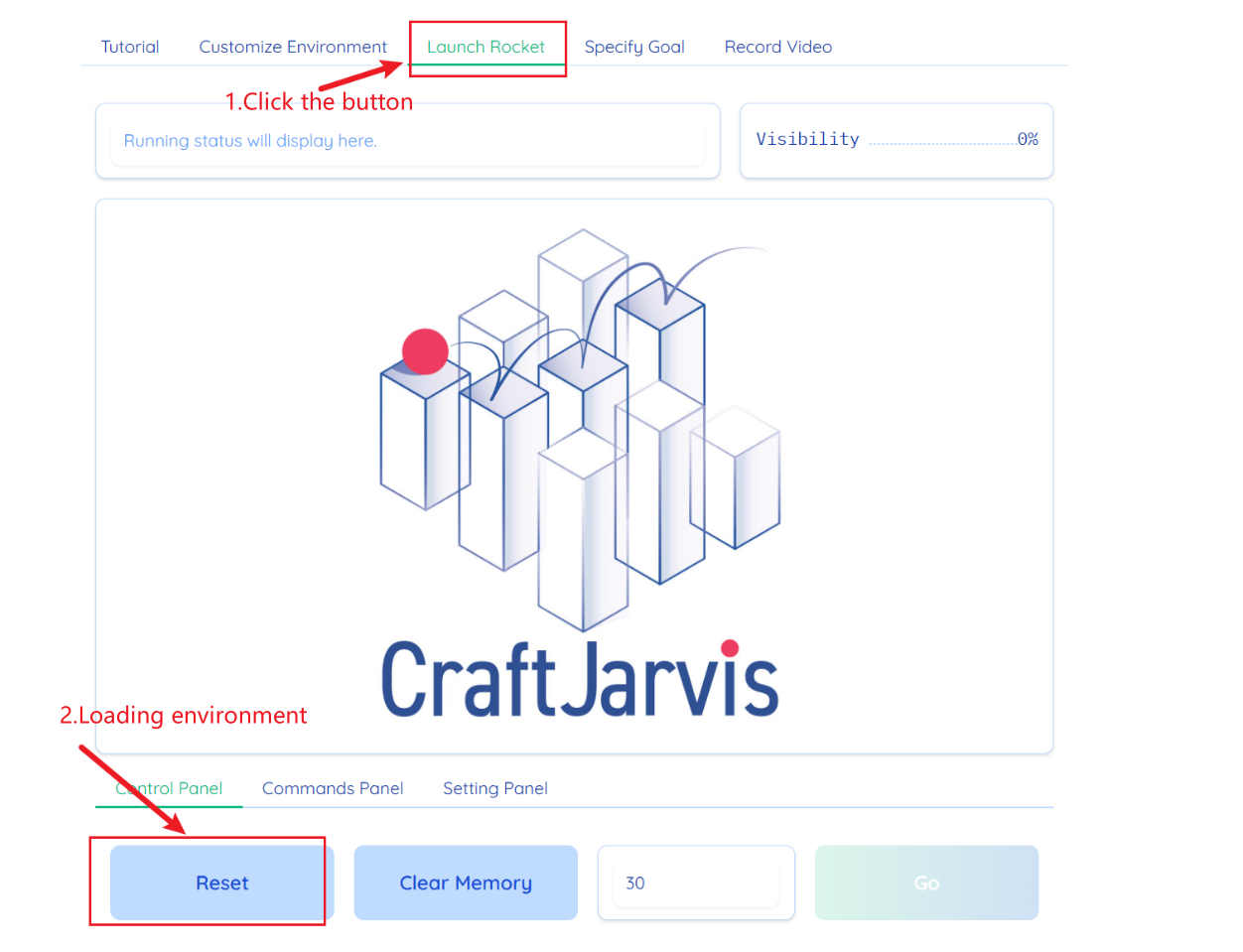
- ادخل إلى بيئة تحميل صاروخ الإطلاق
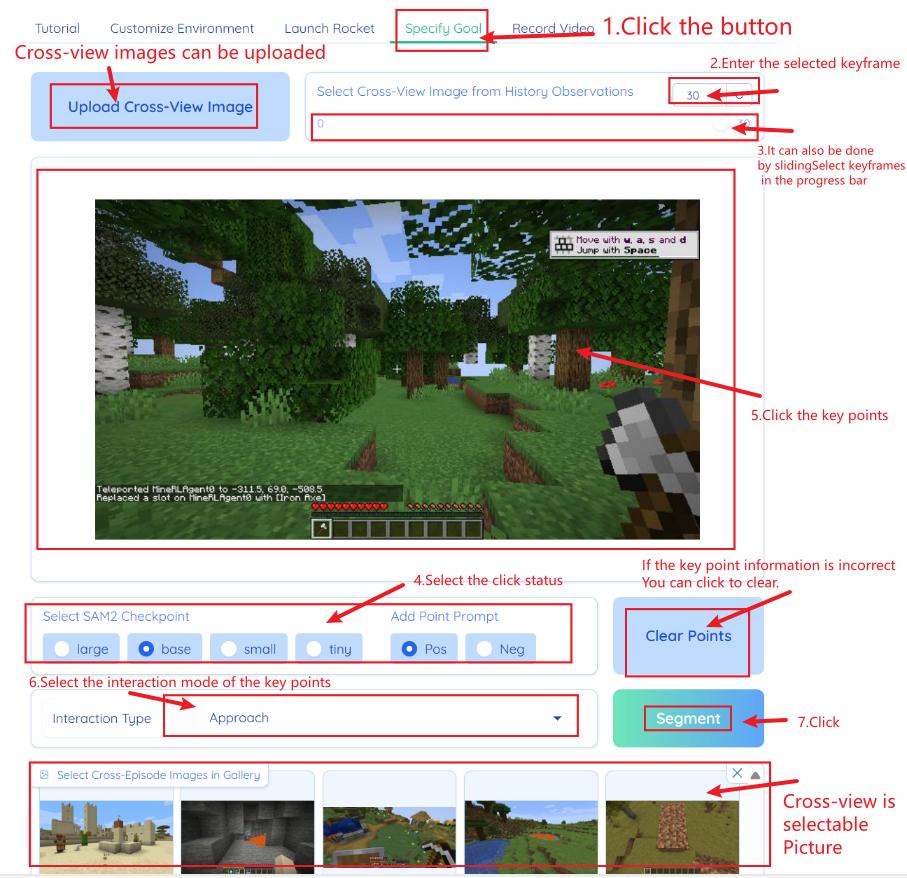
- أدخل "تحديد الهدف" واختر نقطة الهدف وطريقة التفاعل
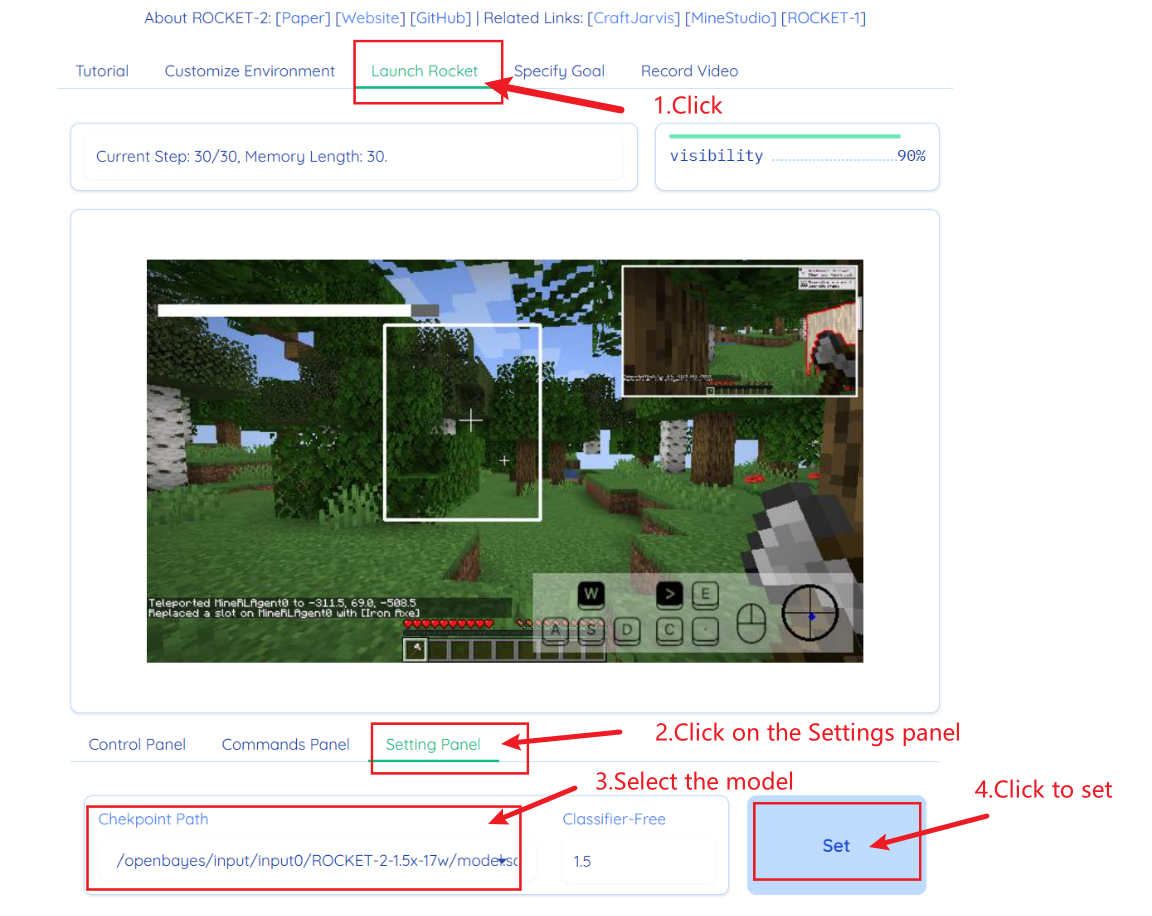
- ادخل إلى لوحة إعدادات Launch Rocket وحدد الطراز
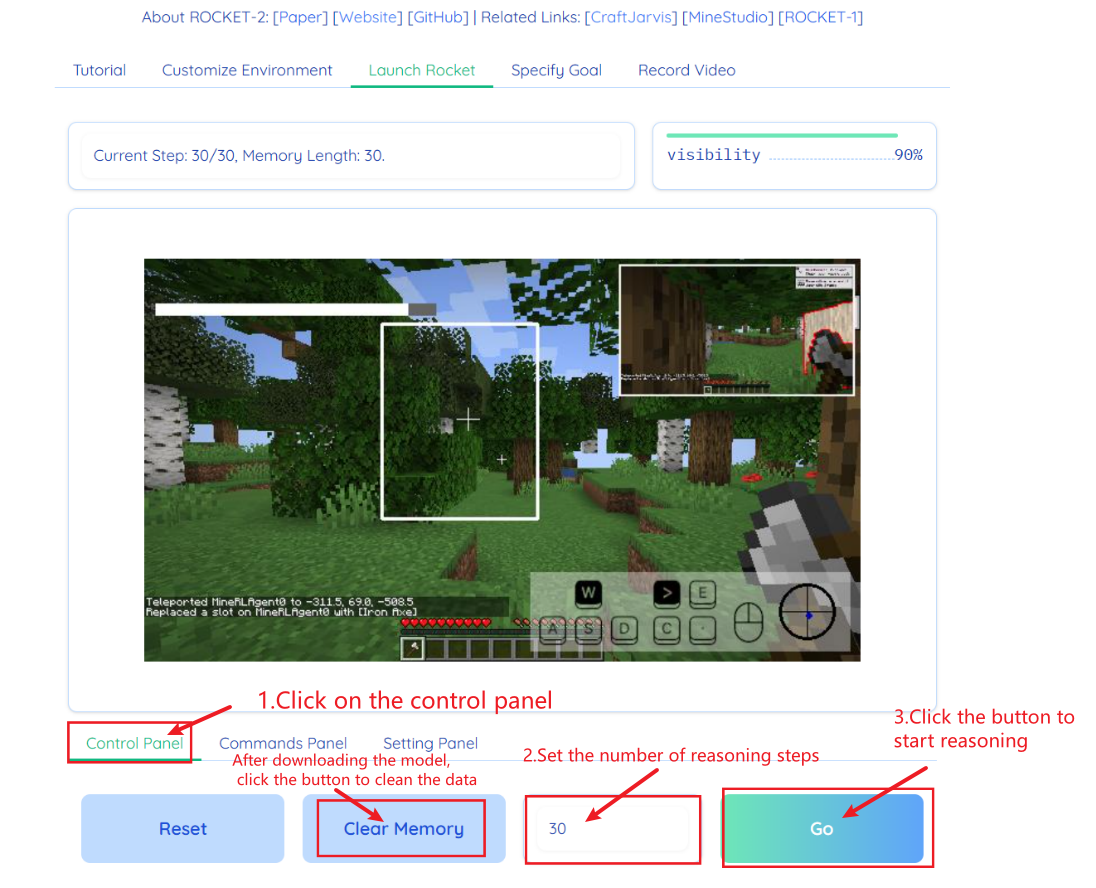
- أدخل لوحة التحكم الخاصة بـ Launch Rocket لتعيين خطوات الاستدلال وإجراء الاستدلال
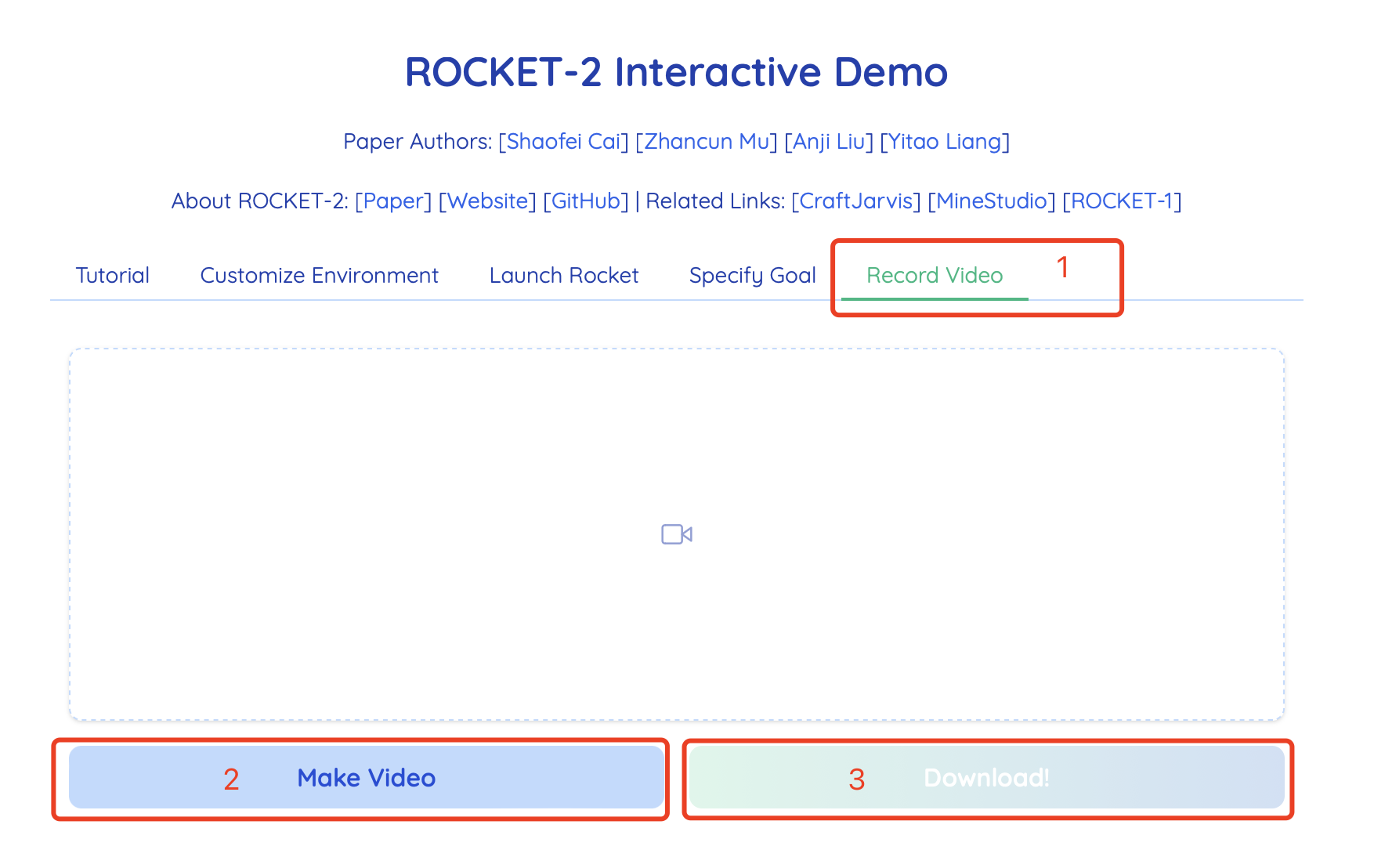
- كرر الخطوات من 4 إلى 6 حتى اكتمال عملية الاستدلال. بعد ذلك، قم بالدخول إلى وضع تسجيل الفيديو لإنشاء الفيديو وتنزيله. هذا الفيديو غير متاح على الانترنت.
معلومات الاستشهاد
معلومات الاستشهاد لهذا المشروع هي كما يلي:
@article{cai2025rocket,
title={ROCKET-2: Steering Visuomotor Policy via Cross-View Goal Alignment},
author={Cai, Shaofei and Mu, Zhancun and Liu, Anji and Liang, Yitao},
journal={arXiv preprint arXiv:2503.02505},
year={2025}
}
بناء الذكاء الاصطناعي بالذكاء الاصطناعي
من الفكرة إلى الإطلاق — سرّع تطوير الذكاء الاصطناعي الخاص بك مع المساعدة البرمجية المجانية بالذكاء الاصطناعي، وبيئة جاهزة للاستخدام، وأفضل أسعار لوحدات معالجة الرسومات.