Command Palette
Search for a command to run...
أكبر مجموعة بيانات روبوت مفتوحة المصدر! تعاونت شركة DeepMind مع 21 مؤسسة، وقامت بدمج 60 مجموعة بيانات، وأصدرت Open X-Embodiment، إيذانا ببدء عصر الذكاء المتجسد.
انتشر مؤخرًا على الإنترنت مقطع فيديو لكلب روبوتي يعمل كحمال في جبل تاي.لا يستطيع "كلب الروبوت" هذا حمل الإمدادات الثقيلة بسهولة فحسب، بل يمكنه أيضًا "المشي بسرعة" على الطرق الجبلية شديدة الانحدار في جبل تاي، حيث يصل إلى قمة الجبل من سفح الجبل في ساعتين فقط! وأشادت نائبة وزير الخارجية الصيني هوا تشون ينغ أيضًا بالروبوت قائلة: "يعمل الكلب الروبوت كحمال على جبل تاي المهيب، والتكنولوجيا تفيد البشرية".

ومن المعلوم أن المهمة الرئيسية لهذا الكلب الروبوت الذي قدمته شركة العقارات التابعة لمجموعة تايشان للسياحة الثقافية هي إزالة القمامة ونقل البضائع. في الماضي، بسبب التضاريس الخاصة لمنطقة جبل تاي ذات المناظر الخلابة، لم يكن من الممكن الاعتماد على النقل اليدوي إلا في أعمال تنظيف القمامة، وخلال فترات الذروة لتدفق الركاب، كان من المستحيل في كثير من الأحيان تنظيف القمامة ونقلها. لا يتمتع "الكلب الروبوت" المشارك في الاختبار بقدرة قوية على التكيف مع التضاريس، والاستقرار العالي، والقدرة العالية على التوازن فحسب، بل يمكنه أيضًا عبور العقبات بسهولة. يمكن أن تصل سعة حمولتها إلى 120 كيلوغرامًا، مما يمكن أن يحل مشكلة إزالة القمامة ويحسن كفاءة العمل.
Google RT-2، NVIDIA GR00T، روبوت Figure 02، Tesla Optimus، Xiaomi CyberOne... في السنوات الأخيرة، مع ظهور المزيد والمزيد من الروبوتات، أصبح الذكاء المتجسد باستخدام هذه الروبوتات كحاملات أيضًا موضوعًا ساخنًا.تتمتع هذه الروبوتات، التي يمكنها إدراك محيطها والتعلم والتفاعل معه والمشاركة بشكل مباشر في الحياة الحقيقية للإنسان، بإمكانيات كبيرة في السوق.
سواء كان الأمر يتعلق بالتفتيش واللحام والمناولة والفرز والتجميع في المجال الصناعي، وخدمات التدبير المنزلي ورعاية المسنين في المشهد المنزلي، والمساعدة الجراحية والرعاية اليومية في المجال الطبي، فضلاً عن الزراعة والتسميد والحصاد في الزراعة، فإن سيناريوهات تطبيق الذكاء المتجسد واسعة ومتنوعة.
ومع ذلك، على الرغم من أن الروبوتات الحالية تعمل بشكل جيد في مهام محددة معينة، إلا أنها لا تزال تفتقر إلى التنوع، مما يعني أننا بحاجة إلى تدريب نموذج لكل مهمة، وكل روبوت، وحتى لكل سيناريو تطبيق. وبالاستفادة من الخبرات الناجحة في مجالات مثل معالجة اللغة الطبيعية والرؤية الحاسوبية، قد نتمكن من تدريب الروبوتات لتصبح أكثر عمومية من خلال السماح لها بالتعلم من مجموعات بيانات واسعة ومتنوعة. لكن،غالبًا ما تركز مجموعات البيانات الروبوتية الموجودة على بيئة واحدة، أو مجموعة من الكائنات، أو مهمة محددة. من الصعب الحصول على مجموعات بيانات كبيرة ومتنوعة للتفاعل الروبوتي.
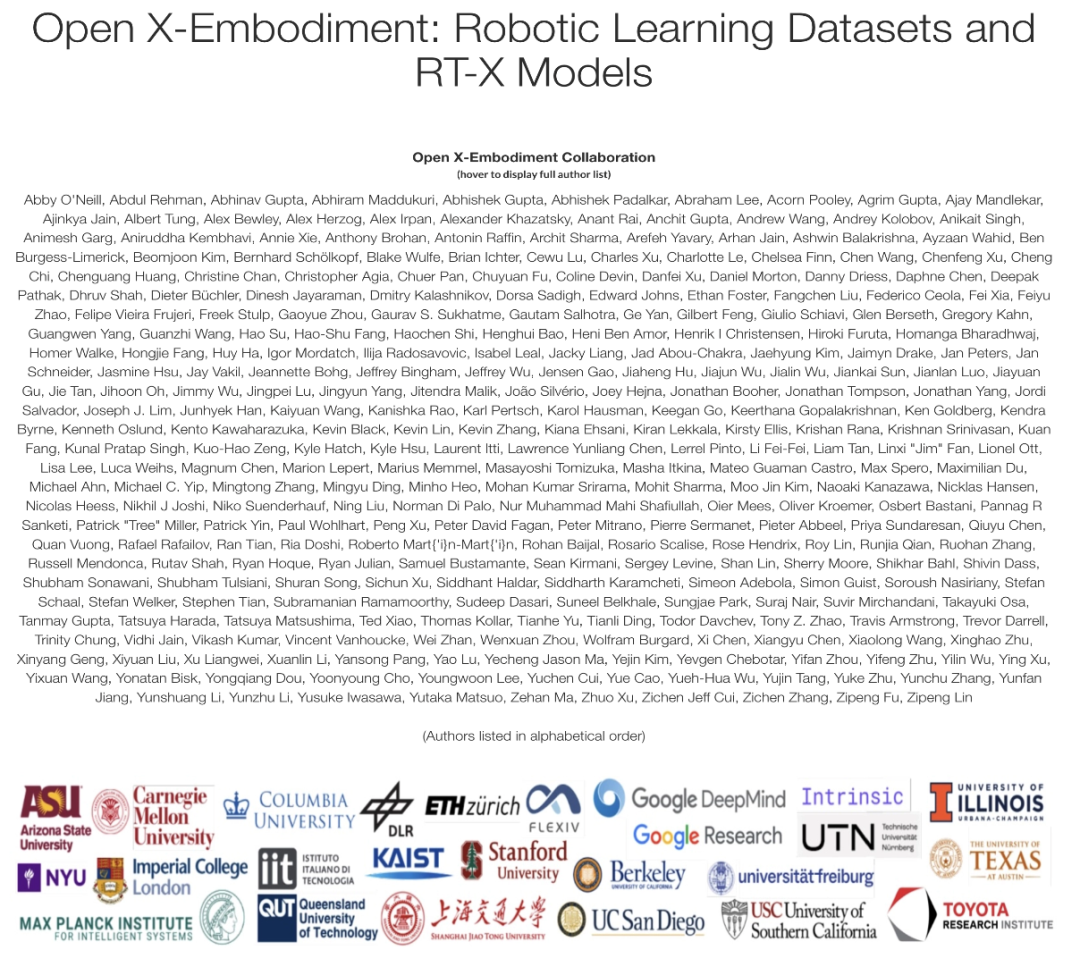
ردًا على ذلك، تعاونت Google DeepMind مع 21 مؤسسة مشهورة دوليًا بما في ذلك جامعة ستانفورد، وجامعة شنغهاي جياوتونغ، وNVIDIA، وجامعة نيويورك، وجامعة كولومبيا، وجامعة طوكيو، وRIKEN، وجامعة كارنيجي ميلون، وETH زيورخ، وإمبريال كوليدج لندن لدمج 60 مجموعة بيانات روبوت موجودة.تم إنشاء مجموعة بيانات مفتوحة وواسعة النطاق وموحدة لتعلم الروبوتات - Open X-Embodiment.
ومن المفهوم أن مجموعة بيانات Open X-Embodiment تغطي بيئات مختلفة وتغييرات الروبوت وهي مفتوحة حاليًا لمجتمع البحث. ولتسهيل عملية تنزيل البيانات واستخدامها على المستخدمين، قام الباحثون بتحويل مجموعات البيانات من مصادر مختلفة إلى تنسيق بيانات موحد. وفي المستقبل، يخططون للتعاون مع مجتمع التعلم الآلي لتعزيز نمو هذه المجموعة من البيانات بشكل مشترك. أطلقت شركة HyperAI مجموعة بيانات "Open X-Embodiment Real Robot Dataset" على موقعها الرسمي، والتي يمكن تنزيلها بنقرة واحدة!
مجموعة بيانات الروبوت الحقيقي Open X-Embodiment:
https://go.hyper.ai/JAeHn
أكبر مجموعة بيانات مفتوحة المصدر للروبوتات حتى الآن
يُقال أن Open X-Embodiment هي أكبر مجموعة بيانات مفتوحة المصدر للروبوتات الحقيقية حتى الآن.ويغطي الكتاب 22 نوعًا مختلفًا من الروبوتات، بدءًا من الروبوتات ذات الذراع الواحدة إلى الروبوتات ذات الذراعين إلى الروبوتات ذات الأربع أرجل، بإجمالي يزيد عن مليون مسار روبوت و527 مهارة (160266 مهمة). وأظهر الباحثون أن النماذج المدربة على بيانات من أنواع متعددة من الروبوتات كان أداؤها أفضل من النماذج المدربة على بيانات من نوع روبوت واحد فقط.
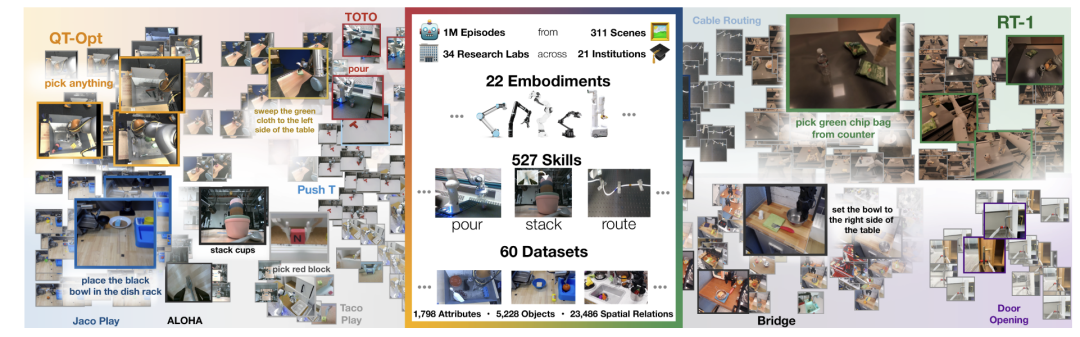
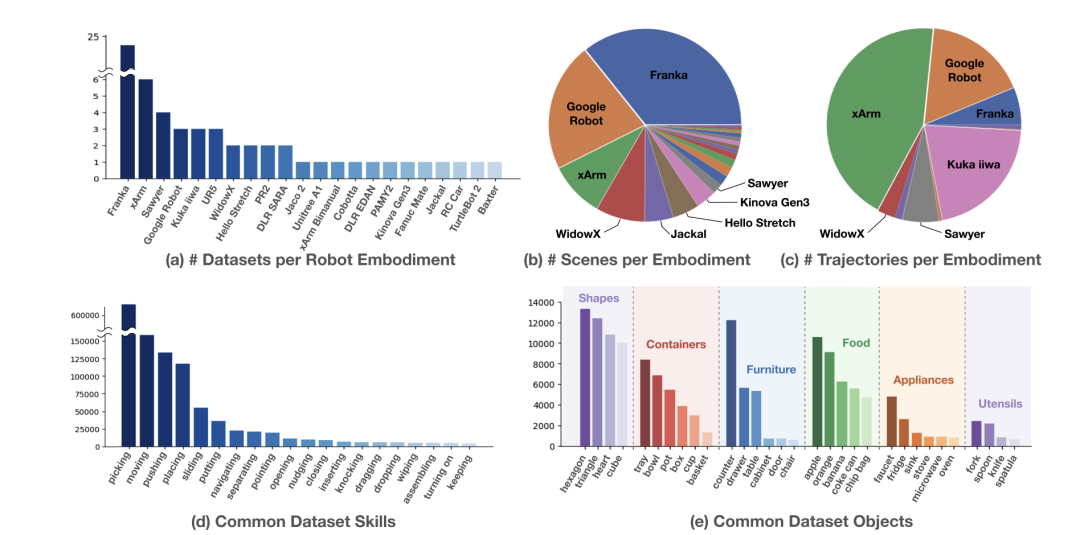
يظهر توزيع مجموعة بيانات Open X-Embodiment في الشكل أدناه.يوضح الشكل (أ) توزيع 22 مجموعة بيانات حول مورفولوجيا الروبوتات، ومن بينها روبوت فرانكا الأكثر شيوعًا. يوضح الشكل (ب) توزيع الروبوتات في سيناريوهات مختلفة، حيث يهيمن روبوت فرانكا، يليه روبوت جوجل. يوضح الشكل (ج) توزيع مسارات كل شكل من أشكال الروبوت، حيث يساهم xArm وGoogle Robot بأكبر عدد من المسارات. يوضح الشكلان (د، هـ) على التوالي المهارات التي يمتلكها الروبوت والأشياء التي يستخدمها. وتشمل المهارات الالتقاط والتحريك والدفع والوضع وما إلى ذلك، وتشمل الأشياء الأجهزة المنزلية والطعام وأدوات المائدة وما إلى ذلك، وهي من أنواع مختلفة.
جمع الموارد المؤسسية المتميزة لتعزيز التطبيق الواسع النطاق لتكنولوجيا الروبوتات
تتكون مجموعة بيانات Open X-Embodiment من 60 مجموعة بيانات مستقلة.لقد اختارت HyperAI بعض مجموعات البيانات خصيصًا لك، والتي يتم تقديمها بإيجاز على النحو التالي:
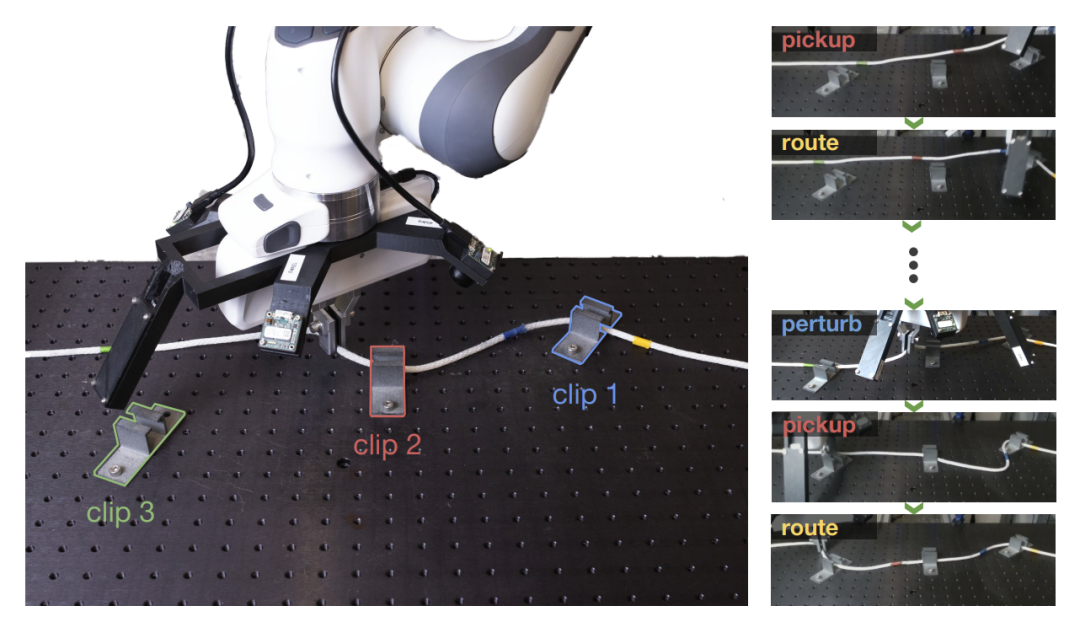
مجموعة بيانات مهام توجيه الكابلات الروبوتية متعددة المراحل من Berkeley Cable Routing
تم إصدار مجموعة بيانات Berkeley Cable Routing بواسطة جامعة كاليفورنيا، بيركلي وفريق البحث Intrinsic Innovation LLC. يبلغ حجمه الإجمالي 27.92 جيجابايت ويُستخدم لدراسة مهام معالجة الروبوت متعددة المراحل.يستخدم بشكل خاص لمهام توجيه الكابلات.تمثل هذه المهمة سيناريو معقدًا للتلاعب بالروبوتات متعدد المراحل حيث يجب على الروبوت تمرير كابل عبر سلسلة من المشابك، والتعامل مع الأشياء القابلة للتشوه، وإغلاق حلقة الإدراك البصري، ومعالجة السلوكيات الممتدة المكونة من خطوات متعددة.
الاستخدام المباشر:https://go.hyper.ai/igi9x
مجموعة بيانات CLVR Jaco Play، مجموعة بيانات روبوت التحكم عن بعد
مجموعة بيانات CLVR Jaco Play هي مجموعة بيانات تركز على مجال الروبوتات التي يتم التحكم فيها عن بعد.تم إصدار ملف بحجم 14.87 جيجابايت من قبل فريق بحثي من جامعة جنوب كاليفورنيا وKAIST، ويحتوي على 1085 مقطع فيديو للروبوت الذي يتم التحكم فيه عن بعد Jaco 2، مع التعليقات اللغوية المقابلة. تُعد مجموعة البيانات هذه موردًا قيمًا للعلماء والمطورين العاملين في مجالات مثل التحكم عن بعد في الروبوتات، ومعالجة اللغة الطبيعية، والتفاعل بين الإنسان والحاسوب.
الاستخدام المباشر:https://go.hyper.ai/WPxG8
مجموعة بيانات روبوتات RT-1 في العالم الحقيقي
اقترح باحثو Google نموذجًا متعدد المهام Robotics Transformer (RT-1)، والذي حقق تحسينات كبيرة في التعميم بدون أخطاء على المهام والبيئات والأشياء الجديدة، مما يدل على قابلية التوسع الممتازة وخصائص النموذج المدرب مسبقًا.
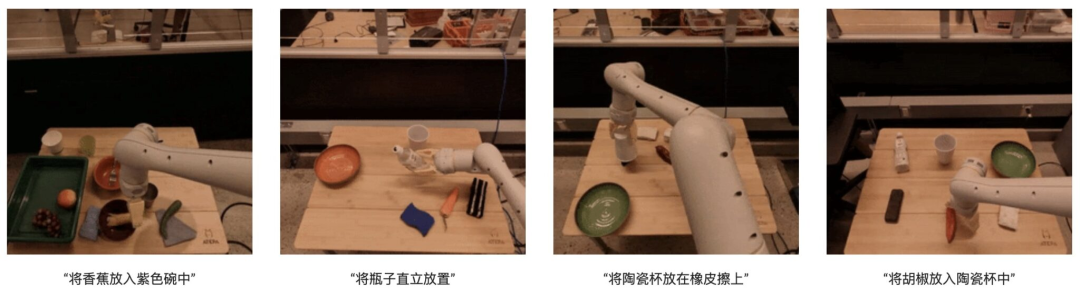
تم تدريب نموذج RT-1 على مجموعة بيانات الروبوتات الحقيقية واسعة النطاق (مجموعة بيانات عمل الروبوت RT-1)، باستخدام 13 ذراعًا روبوتية EDR، كل منها مزود بذراع 7 درجات حرية، ومقبض ذو إصبعين، وقاعدة متحركة.تم جمع 130 ألف مقطع خلال 17 شهرًا.يبلغ إجمالي حجمه 111.06 جيجابايت، وكل جزء مزود بوصف نصي لتعليمات تنفيذ الروبوت. تشمل المهارات عالية المستوى التي تغطيها مجموعة البيانات التقاط الأشياء ووضعها، وفتح الأدراج وإغلاقها، وإخراج الأشياء من الأدراج ووضعها فيها، ووضع الأشياء الطويلة والرفيعة في وضع مستقيم، ودفع الأشياء، وسحب المناديل، وفتح البرطمانات.تم تغطية أكثر من 700 مهمة باستخدام مجموعة متنوعة من الكائنات المختلفة.
الاستخدام المباشر:https://go.hyper.ai/V9gL0
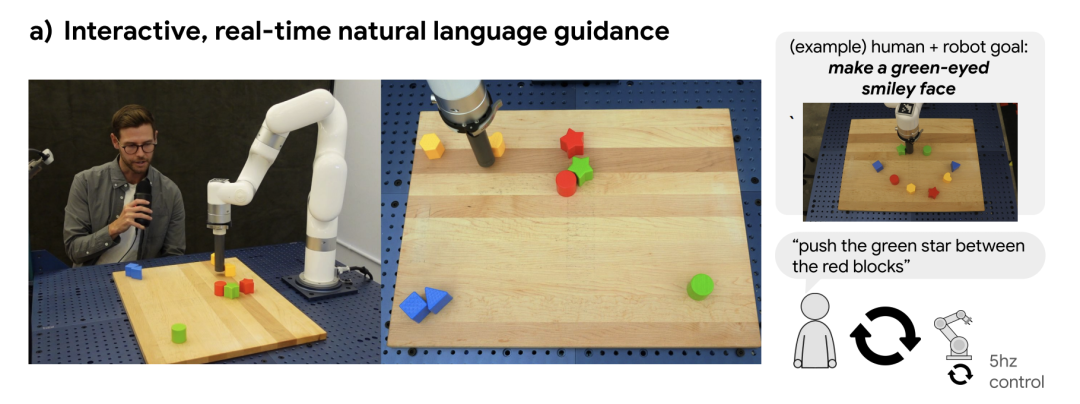
مجموعة بيانات مسار تسمية لغة روبوت جدول اللغة
اقترح فريق الروبوتات في جوجل إطار عمل لبناء الروبوتات التي يمكنها التفاعل في الوقت الحقيقي في العالم الحقيقي باستخدام تعليمات اللغة الطبيعية. ومن خلال التدريب على مجموعة بيانات تضم مئات الآلاف من المسارات الموضحة لغويًا، وجد الباحثون أن السياسة الناتجة كانت قادرة على تنفيذ تعليمات أكثر بعشر مرات مما كان ممكنًا في السابق، ووصف المهارات الحركية السمعية والبصرية الشاملة في العالم الحقيقي. قام الباحثون بإتاحة مجموعة بيانات Language-Table المستخدمة في دراستهم كمصدر مفتوح.تحتوي مجموعة البيانات على ما يقرب من 600000 مسار مع تسميات اللغة.يتم استخدامه لتعزيز تطوير الروبوتات الأكثر تقدمًا وكفاءة والتي يمكنها التفاعل مع اللغة الطبيعية.
الاستخدام المباشر:https://go.hyper.ai/9zvRk
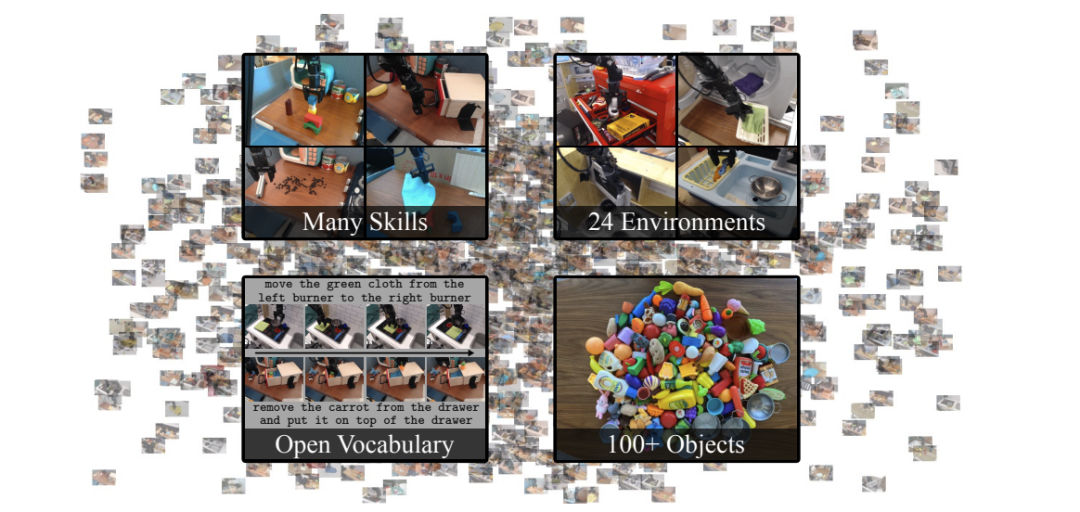
مجموعة بيانات BridgeData V2 لتعلم الروبوتات واسعة النطاق
أصدرت جامعة كاليفورنيا في بيركلي وجامعة ستانفورد وجوجل ديب مايند وجامعة كارنيجي ميلون بشكل مشترك مجموعة بيانات BridgeData V2، المخصصة لتعزيز أبحاث الروبوتات القابلة للتطوير.يحتوي على 60,096 مسار روبوت تم جمعها في 24 بيئة مختلفة.ومن بينها 24 بيئة مقسمة إلى 4 فئات. تأتي معظم البيانات من مطابخ ألعاب مختلفة، بما في ذلك الأحواض والمواقد وأفران الميكروويف، وما إلى ذلك. تشمل البيئات المتبقية أسطح مكتب مختلفة، وأحواض ألعاب، وغسيل ألعاب، وما إلى ذلك. المهام المضمنة في مجموعة البيانات هي الالتقاط والوضع، والدفع والكنس، وفتح وإغلاق الأبواب والأدراج، بالإضافة إلى مهام أكثر تعقيدًا مثل تكديس المكعبات، وطي الغسيل، وكنس الوسائط الحبيبية، مع بعض مقتطفات البيانات التي تحتوي على مزيج من هذه المهارات.
لتحسين قدرة الروبوت على التعميم، جمع الباحثون كمية كبيرة من بيانات المهام في مجموعة متنوعة من البيئات مع أشياء مختلفة، ومواضع الكاميرات، ومواضع مساحة العمل.يتم إرفاق كل مسار بتعليمات باللغة الطبيعية تتوافق مع مهمة الروبوت.يمكن تطبيق المهارات المكتسبة من هذه البيانات على أشياء وبيئات جديدة، بل ويمكن استخدامها عبر المؤسسات، مما يجعل هذه المجموعة من البيانات موردًا رائعًا للباحثين.
الاستخدام المباشر:https://go.hyper.ai/mGXA1
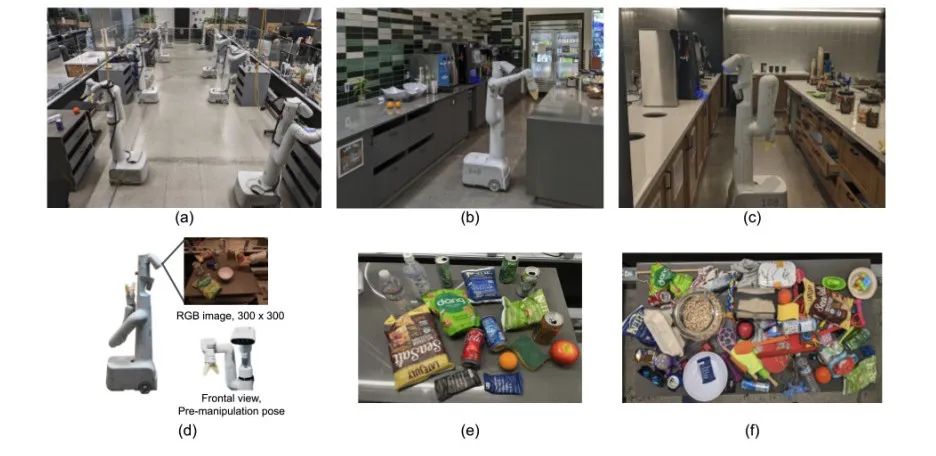
مجموعة بيانات تعلم الروبوت BC-Z
تم إصدار مجموعة بيانات BC-Z بشكل مشترك من قبل Google وEveryday Robots وجامعة كاليفورنيا في بيركلي وجامعة ستانفورد. تهدف مجموعة بيانات تعلم الروبوتات واسعة النطاق هذه إلى تعزيز تطوير مجال تعلم تقليد الروبوتات، وخاصة لدعم تعميم المهام ذات العينة الصفرية، أي السماح للروبوتات بأداء مهام تشغيلية جديدة من خلال التعلم بالتقليد دون خبرة سابقة.
تحتوي مجموعة البيانات على أكثر من 25,877 سيناريوهات مهام تشغيلية مختلفة، تغطي 100 مهمة متنوعة.تم جمع هذه المهام من خلال عمليات التشغيل عن بعد المتخصصة والاستقلالية المشتركة التي شملت 12 روبوتًا و7 مشغلين، مما أدى إلى تراكم 125 ساعة من وقت تشغيل الروبوت. يمكن استخدام مجموعة البيانات لتدريب سياسة متعددة المهام ذات 7 درجات حرية يمكن ضبطها لأداء مهام محددة استنادًا إلى وصف لفظي للمهمة أو مقطع فيديو لشخص يؤدي المهمة.
الاستخدام المباشر:https://go.hyper.ai/MdnFu
ما ورد أعلاه هو مجموعات البيانات التي أوصت بها HyperAI في هذا العدد. إذا رأيت مصادر بيانات عالية الجودة، فنحن نرحب بك لترك رسالة أو إرسال مقال لإخبارنا بذلك!
مزيد من مجموعات البيانات عالية الجودة للتنزيل:https://go.hyper.ai/P5Mtc