Command Palette
Search for a command to run...
تستخدم جامعة تشجيانغ SVM لتحسين أجهزة الاستشعار اللمسية، ويصل معدل التعرف على برايل إلى 96.12%

يعد الاستشعار الحيوي وسيلة مهمة للتفاعل بين البشر والآلات، والبشر والبيئة، والآلات والبيئة. ومن بينها، يمكن للمس تحقيق إدراك بيئي دقيق ومساعدة المستخدمين على التفاعل مع البيئات المعقدة.
لتقليد حاسة اللمس لدى الإنسان، قام الباحثون بتطوير أجهزة استشعار مختلفة لمحاكاة إدراك الجلد للبيئة. ومع ذلك، فإن الاستشعار اللمسي له متطلبات عالية واختلافات متنوعة في المعلمات، مما يتطلب الكثير من الخبرة في البحث والتطوير، والبحث الكافي في الأدبيات، وعدد كبير من تجارب التجربة والخطأ، ودورة البحث والتطوير طويلة جدًا.
ولتحقيق هذه الغاية، استخدم باحثون من جامعة تشجيانغ آلات متجه الدعم لتحسين معلمات أجهزة الاستشعار اللمسية للمولدات النانوية الكهربائية الاحتكاكية. يمكن لمستشعر اللمس المحسن التعرف على أنماط اللمس المتعددة وتحقيق التعرف على طريقة برايل. ومن المتوقع أن يوفر هذا الإنجاز حلولاً جديدة لتطوير أجهزة الاستشعار اللمسية.
المؤلف | شيويه تساي
المحرر | سانيانغ
لمحاكاة النظام الحسي البشري، قام الباحثون بتطوير سلسلة من أجهزة الاستشعار الشبيهة بالجلد لمراقبة المعلومات مثل اللمس والضغط والاهتزاز ودرجة الحرارة والرطوبة. في،تعتبر أجهزة الاستشعار اللمسية الجزء الأكثر أهمية في التفاعل مع البيئات المعقدةوقد تم استخدام الذكاء الاصطناعي على نطاق واسع في مراقبة الصحة والروبوتات الذكية والتفاعل بين الإنسان والحاسوب والواقع الافتراضي/المعزز.
يجب أن يتمتع المستشعر المثالي بحساسية عالية ونطاق تشغيل واسع وإمكانية تكرار ممتازة. غالبًا ما يتطلب هذا تحديد معلمات المستشعر بناءً على خبرة البحث والتطوير أو البحث الأدبي، ثم إجراء تجارب متعددة للمحاولة والخطأ، وأخيرًا استخدام المستشعر الأمثل لأداء مهام محددة.
ومع ذلك، فإن استراتيجية التصميم التغذية الأمامية هذه تعزل تصميم وتطبيق أجهزة الاستشعار، وتزيد من عبء البيانات، وتضعف خصائص الإشارة، وتقلل من كفاءة التحليل الحسابي.
الشكل 1: طرف اصطناعي معياري يعتمد على أجهزة استشعار اللمس (أ) وأجهزة استشعار فحص الثدي (ب)
من أجل تحسين استقرار التعرف على إشارة المستشعر،غالبًا ما تُستخدم خوارزميات التعلم الآلي لتحليل الارتباطات والاختلافات الدقيقة بين الإشارات من قنوات مختلفة. ومؤخرا، ذهب فريق البحث الذي يضم يانغ جينج وشو كايتشن في جامعة تشجيانغ إلى خطوة أبعد من ذلك.تم تحسين تصميم مستشعر اللمس لمولد النانو الكهربائي الاحتكاكي (TENG) بواسطة آلة الدعم المتجه (SVM). يمكن للمستشعر المحسن التعرف بدقة على 6 أنماط لمس ديناميكية وإجراء التعرف على النص والتعرف على طريقة برايل بناءً عليها.. وقد نشرت النتائج ذات الصلة في مجلة "Advanced Science".

وقد تم نشر النتائج ذات الصلة في مجلة "العلوم المتقدمة"
رابط الورقة:
https://onlinelibrary.wiley.com/doi/10.1002/advs.202303949
الإجراءات التجريبية
ملخص:معلمات التحسين وخوارزميات التحسين
يرتبط أداء أجهزة الاستشعار اللمسية القائمة على TENG بشكل أساسي بالمعلمات التالية:وتشمل هذه المعلمات نوع إشارة الخرج، وكثافة القطب، وشكل وتوزيع البنية الدقيقة للسطح، وهي المعلمات التي تعمل خوارزمية SVM على تحسينها.
يمكن للمستشعر الموجود على الإصبع التعرف على ستة أنماط لمس، بما في ذلك الضغط، والنقر، والأعلى، والأسفل، واليسار، واليمين. يعد تحديد أنماط اللمس الستة هذه هدف اختبار المستشعر ويُستخدم لتحسين معلمات التصميم.
يتم استخدام خوارزمية SVM لتقييم جودة إشارة الإخراج واختيار معلمات التصميم المثلى. تختلف عملية تصميم SVM عن عملية التصميم التقليدية التي تعتمد على الخبرة، حيث توفر طريقة تصميم SVM طريقة لتحسين المعلمات تعتمد على البيانات وتربط بشكل وثيق بين تصميم الجهاز والخوارزميات.

الشكل 2: عملية تحسين المستشعر اللمسي استنادًا إلى التعلم الآلي
نماذج التعلم الآلي:SVM + CNN
في هذه الدراسة، تم الحصول على مصنف SVM باستخدام مكتبة scikit-learn في Python. هناك 10 مصنفات في المجموع، ويتراوح معامل التنظيم من 0.1 إلى 1.0.
وفي الوقت نفسه، بناءً على إطار عمل PyTorch، تم تطوير شبكة عصبية ملتوية أحادية البعد (CNN) في Python لتعلم الميزات والتعرف عليها في عملية التحقق. تتكون الشبكة العصبية التلافيفية CNN من خمس طبقات ملتوية تليها دالة تطبيع الدفعة ووحدة خطية مصححة (ReLU). تم تدريب النموذج باستخدام خوارزمية تقدير اللحظة التكيفية (آدم) بمعدل تعلم يبلغ 0.001 وحجم دفعة يبلغ 128.

الشكل 3: مخطط نموذج CNN
عملية الإنتاج:الكتابة المباشرة بالليزر + تغليف PDMS
يتضمن إنتاج مستشعر اللمس TENG بشكل أساسي 6 خطوات:
1. تصنيع أقطاب كهربائية بين رقمية باستخدام تقنية الكتابة المباشرة بالليزر تحت الأحمر. يمكن أن يؤدي التأثير الحراري لليزر إلى تحفيز كربنة فيلم البولي إيميد (PI) للحصول على نمط الجرافين المستحث بالليزر (LIG)؛
2. طلاء البولي ديميثيل السيلوكسان (PDMS) على فيلم LIG/PI؛
3. بعد أن يتغلغل محلول PDMS في البنية المسامية لـ LIG، يتم تقشير فيلم PI للحصول على فيلم LIG/PDMS؛
4. معالجة الفيلم باستخدام بلازما الأكسجين لإدخال المجموعات الكهربية السلبية وإزالة الشوائب الموجودة على سطح الفيلم؛
5. إدخال فيلم كوبوليمر البروبيلين البيرفلوروإيثيلين (FEP) لتعزيز التأثير الكهربائي الاحتكاكي للجهاز؛
6. أخيرًا، قم بالتغليف باستخدام PDMS وقم بإجراء النمذجة باستخدام الليزر.

الشكل 4: عملية إنتاج مستشعر اللمس TENG
نوع إشارة الخرج:التيار والجهد
يرتبط نوع إشارة الخرج ارتباطًا وثيقًا بأداء الكشف الخاص بـ TENGلذلك قام الباحثون أولاً بمقارنة تأثيرات جهد الاحتكاك وتيار الاحتكاك على أداء المستشعر.
أولاً، إمكانية تكرار البيانات لهذين النوعين من إشارات الإخراج. إن توزيع الإشارة الحالية غير منتظم وله انحراف كبير عن متوسط البيانات، في حين أن بيانات الجهد لها انحراف صغير فقط عن متوسط البيانات ويمكن تكرارها بشكل أكبر.
بالإضافة إلى ذلك، استخدم الباحثون مصنف SVM خطي لتصنيف البيانات، بدقة تصنيف 94.278% لإشارات الجهد و95.579% لإشارات التيار.إن قابلية الفصل والتمييز بين إشارات الجهد والتيار هي [3,636، 11.877] و [3.528، 11,267] على التوالي.
من أجل القضاء على تأثير البيانات ذات الأبعاد المختلفة، يتم توحيد المؤشرات المذكورة أعلاه، تتغير نتيجة إشارة الجهد من [94,278%, 3.636, 11,877] إلى [0, 1, 1]، وتتغير نتيجة إشارة التيار من [95,579%, 3.528, 11,267] إلى [1, 0, 0]. يوضح هذا أن هناك معيارين لتقييم إشارات الجهد، أيهما أكثر ملاءمة لإخراج الإشارة.

الشكل 5: استجابة جهد الخرج وتيار الخرج لـ 6 أنماط لمس
أ&ب: استجابات إشارة الجهد والتيار لـ 6 أوضاع لمس على التوالي؛
ج&د: نتائج تخفيض الأبعاد لإشارات الجهد والتيار الخارجة على التوالي.
كثافة القطب:متفرقة وكثيفة
تؤثر كثافة الأقطاب الكهربائية على تعقيد الإشارة. قام الباحثون بدراسة أداء الجهاز عندما تم توزيع الأقطاب الكهربائية بشكل متفرق وكثيف. بعد تقليل أبعاد الإشارة، يمكن ملاحظة أن إشارات الأقطاب الكهربائية الموزعة بشكل متفرق تتمتع بقدرة تمييز أكبر.
دقة التصنيف، والانفصال، والتميز لإشارات الأقطاب الكهربائية المرتبة بشكل متفرق هي [96.975%، 3.695، 14.759]، وتلك الخاصة بالأقطاب الكهربائية المرتبة بكثافة هي [95،958%، 3.528، 11.542] على التوالي. بعد التطبيع، تكون [1، 1، 1] و[0، 0، 0] على التوالي، مما يشير إلى وجود ثلاثة معايير تقييم لإشارات الأقطاب الكهربائية المرتبة بشكل متفرق.
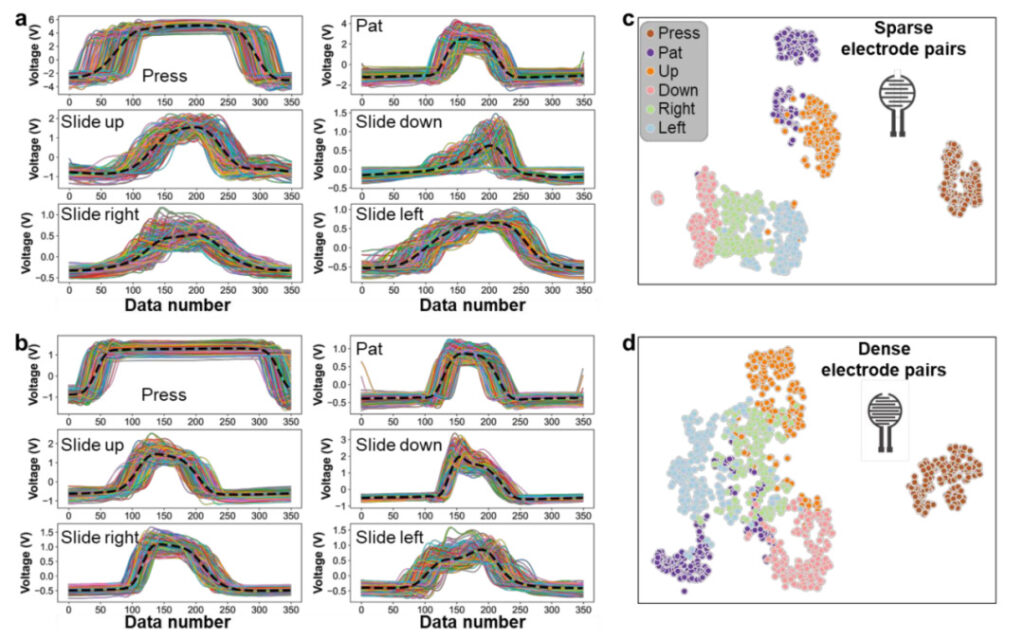
الشكل 6: استجابات الإشارة للأقطاب الكهربائية الموزعة بشكل متفرق وكثيف لستة أنماط لمس
أ&ب: استجابات الإشارة للأقطاب الكهربائية الموزعة بشكل متفرق والأقطاب الكهربائية الموزعة بكثافة لـ 6 أوضاع لمس على التوالي؛
ج&د: نتائج تقليل الأبعاد للإشارات المسجلة بواسطة أقطاب كهربائية موزعة بشكل متفرق وأقطاب كهربائية موزعة بشكل كثيف، على التوالي.
شكل البنية الدقيقة:بصمة الإصبع والشبكة
يمكن للبنية الدقيقة الخشنة لسطح PDMS أن تقلل من تأثير اللزوجة على الإشارة وتحسن نسبة الإشارة إلى الضوضاء.. قام الباحثون بمقارنة تأثيرات الهياكل الدقيقة التي تشبه بصمة الإصبع والهياكل الدقيقة التي تشبه الشبكة على أداء الجهاز ووجدوا أن البيانات من الهيكل الذي يشبه بصمة الإصبع كانت أكثر تركيزًا، في حين كانت الإشارة من الهيكل الذي يشبه الشبكة غير مستقرة.
دقة وانفصال وتميز إشارات البنية الشبيهة ببصمة الإصبع والشبكة هي [96.50%، 4.227، 14.958] و[95.056%، 3.725، 11.783] على التوالي. بعد التطبيع، أصبحت [1، 1، 1] و [0، 0، 0]، مما يشير إلى أن البنية الدقيقة التي تشبه بصمة الإصبع هي الأكثر ملاءمة لهذه التجربة.

الشكل 7: استجابات الإشارة للبنية الدقيقة الشبيهة ببصمة الإصبع (أ) والبنية الدقيقة الشبيهة بالشبكة (ب) لستة أنماط لمس
توزيع البنية الدقيقة:تباعد القنوات
في البنية الدقيقة التي تشبه بصمة الإصبع، تؤثر المسافة بين القنوات المتجاورة أيضًا على جودة الإشارة.. قام الباحثون بمقارنة أداء الأجهزة ذات المسافة بين القنوات 100 و 200 و 300 ميكرومتر. كانت المؤشرات الطبيعية للثلاثة هي [1، 0.902، 1] و [0.042، 1، 0] و [0، 0، 0.228] على التوالي، مما يشير إلى أنه كلما كانت المسافة أصغر، كلما كان ذلك أكثر ملاءمة لإخراج الإشارة.
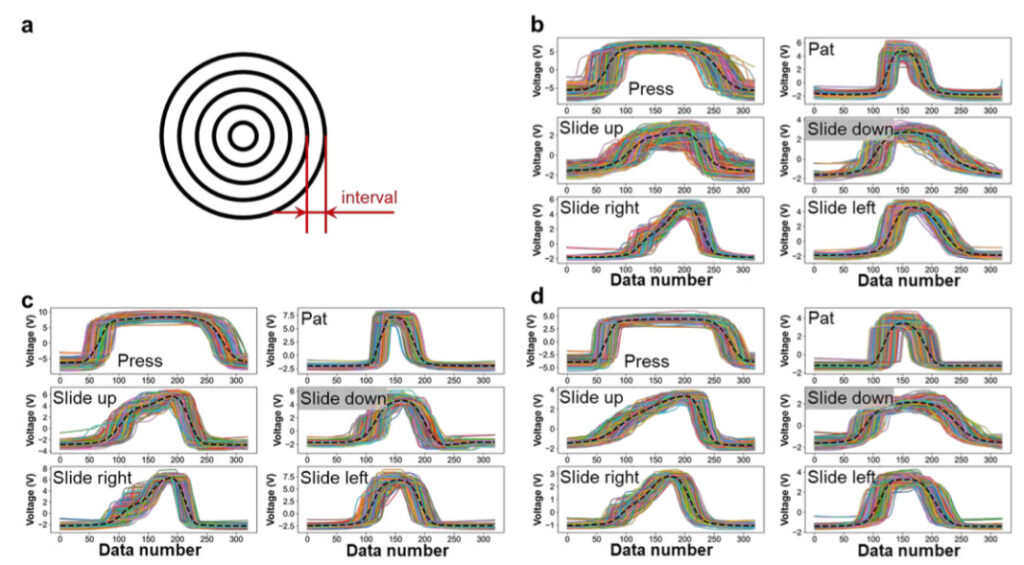
الشكل 8: استجابات الإشارة لتباعد القنوات المختلفة لـ 6 أوضاع لمس
أ: رسم تخطيطي لتباعد القنوات في البنية الدقيقة التي تشبه بصمة الإصبع؛
ب&ج&د: استجابات الإشارة عندما تكون المسافة بين القنوات 300 ميكرومتر، و200 ميكرومتر، و100 ميكرومتر، على التوالي.
يتم تلخيص معلمات الجهاز التي تم الحصول عليها عن طريق تحسين SVM على النحو التالي:

الجدول 1: ملخص معلمات ونتائج تحسين SVM
التحقق التجريبي:التعرف على النص
بفضل المعلمات المُحسّنة بواسطة خوارزمية SVM، يستطيع مستشعر اللمس TENG تحديد 6 أنماط لمس بدقة. لذلك، في وضع قياس الجهد،يمكن لأجهزة استشعار اللمس TENG التمييز بين الحروف المختلفة وبالتالي تحقيق التعرف على النص.
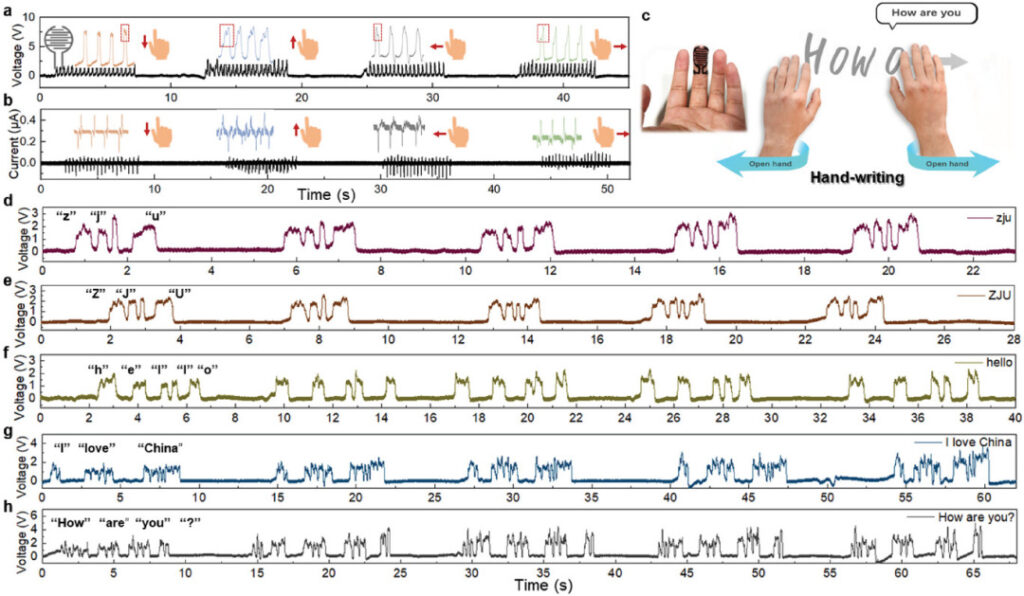
الشكل 9: تطبيق مستشعر اللمس TENG في التعرف على النصوص
أ&ب: جهد وإخراج التيار عند الانزلاق لأعلى ولأسفل ولليسار ولليمين على التوالي؛
ج: مخطط تخطيطي لعملية التعرف على النص عن طريق اللمس؛
dh: إشارات استجابة مستشعر اللمس TENG لجمل مختلفة.
التحقق البيوني:التعرف على طريقة برايل
لتقليد خصائص اللمس للجلد البشري، تم تثبيت مستشعر اللمس TENG المذكور أعلاه على يد الروبوت لاختبار التعرف على طريقة برايل. أولاً، يتم جمع إشارات اللمس لعشرة أرقام برايل بواسطة اليد الروبوتية. بعد ذلك، يتم استخراج الإشارة الضعيفة أثناء عملية الانزلاق من خلال الترشيح عالي التردد.

الشكل 10: إشارات اللمس لعشرة أرقام برايل (يسار) وتوزيع تخفيض الأبعاد (يمين)
تتمتع أرقام برايل هذه بدرجة عالية من التشابه ومن الصعب التعرف عليها. ولتحقيق هذه الغاية، استخدم الباحثون شبكات CNN لتعلم الميزات والتصنيف. دقة تصنيف CNN هي 96.12%، فقط بالنسبة لأرقام برايل الثلاثة 0 و3 و8 ذات التشابه الكبير، فإن الدقة منخفضة.
وللتحقق من جدوى ذلك في التطبيقات العملية، استخدم الباحثون ذراعًا روبوتية للقيام بالتعرف في الوقت الفعلي على أرقام هواتف برايل المكونة من 11 رقمًا. بعد طباعة مجموعة من أرقام هواتف برايل، تصبح اليد الآلية قادرة على التعرف على كل رقم على التوالي، وتوفير ملاحظات في الوقت الحقيقي، وعرضها على واجهة مستخدم رسومية (GUI).

الشكل 11: مستشعر اللمس TENG للتعرف في الوقت الفعلي على أرقام هواتف برايل
وتظهر النتائج أعلاه أنيمكن لمستشعر اللمس TENG المحسن بتقنية SVM التعرف بشكل فعال على النص من خلال الاتصال، ويعزز التفاعل بين الآلات والبيئة، ومن المتوقع أن يوفر حلولاً جديدة لمساعدة ذوي الإعاقة.
مستشعر اللمس TENG
كانت أجهزة الاستشعار الحيوية الأولى تعتمد على التفاعلات المناعية بين المستضد والجسم المضاد أو تفاعلات الحمض النووي المزدوج.تعتبر هذه المستشعرات دقيقة للغاية، ولكنها تستخدم في الغالب في علم الأحياء الجزيئي، ومن الصعب استخدامها في المراقبة البيولوجية على نطاق واسع.
بعد اقتراح مفهوم "إنترنت الأشياء"،بدأ الباحثون في تطوير أجهزة استشعار حيوية عالية الإنتاجية ومنخفضة التكلفة وواسعة النطاق، ظهرت سلسلة من أجهزة الاستشعار البيئية بما في ذلك أجهزة الاستشعار اللمسية.

الشكل 12: تاريخ تطوير أجهزة الاستشعار الحيوية
تم تصميم أجهزة الاستشعار اللمسية المبكرة على أساس المقاومة والسعة والكهرباء الضغطية والتأثيرات الحرارية الكهربائية.ستعمل هذه المكونات على زيادة حجم المستشعر بشكل كبير، مما يحد من استخدامه في سيناريوهات متعددة..
بعد اقتراح TENG في عام 2012، دخل البحث والتطوير لأجهزة الاستشعار اللمسية مرحلة جديدة.يمكن دمج TENGs النانوية في ركائز مرنة مختلفة لتشكيل أجهزة استشعار يمكن ارتداؤها، مما يؤدي بدوره إلى ظهور مفاهيم مثل الجلد الإلكتروني.
ومع ذلك، فإن تطوير أجهزة استشعار اللمس TENG التقليدية يعتمد بشكل أساسي على خبرة فريق البحث والبحث في الأدبيات والتجارب والأخطاء المتعددة. الآن،بمساعدة الذكاء الاصطناعي، يمكن أن يتحول البحث والتطوير لأجهزة استشعار اللمس TENG من الاعتماد على الخبرة إلى الاعتماد على التطبيق، مما يمكن أن يقلل بشكل كبير من دورة البحث والتطوير والتكلفة، ويسرع تنفيذ البحث والتطوير، ويساعد أجهزة استشعار اللمس TENG على الاندماج مع جانب الطلب، وتوفير المزيد من الراحة لحياة الناس.
روابط مرجعية:
[1]https://www.mdpi.com/1424-8220/17/11/2653
[2]https://onlinelibrary.wiley.com/doi/full/10.1002/adma.202008276








