Command Palette
Search for a command to run...
Gradslam (∇SLAM) مفتوح المصدر: جميع الأوراق والأكواد متاحة

∇SLAM، الذي اقترحه فريق من مونتريال وجامعة كارنيجي ميلون في ورقة بحثية نُشرت في ICRA 2020، يحل مشكلة مفتوحة تواجهها أنظمة SLAM الحالية بشكل شائع.
خلال العامين الماضيين، مع التطور السريع للأجهزة الذكية مثل القيادة الذاتية والطائرات بدون طيار، أصبحت التكنولوجيا الرئيسية وراءها - SLAM (التحديد المتزامن للمواقع والرسم الخرائطي) مشهورة أيضًا.
لدى SLAM تاريخ يمتد لأكثر من 30 عامًا. إنها تقنية أساسية للآلات لإدراك وتقدير الحالات وإجراء عمليات مستقلة في بيئات غير معروفة.تحتاج الآلات إلى أداء مهام مثل تخطيط المسار والملاحة، وتحتاج تقنيات الواقع المعزز والواقع الافتراضي إلى بناء مساحات ثلاثية الأبعاد مستقرة. تعتمد كل هذه التقنيات على مساعدة SLAM.
ببساطة، يجيب SLAM على سؤالين:"أين أنا؟" "وماذا يوجد في بيئتي؟"
على سبيل المثال، تعتمد الروبوتات الكناسة على أجهزة الاستشعار بالليدار أو الكاميرات، إلى جانب تقنية SLAM، لفهم تخطيط كل زاوية من زوايا الغرفة بشكل واضح، ثم بناء خريطة بيئية لتخطيط مسار التنظيف بناءً على هذه المعلومات.

ومع ذلك، بعد سنوات من التطوير، لا تزال خوارزميات SLAM التقليدية تواجه مشكلة مفتوحة تتمثل في عدم القدرة على التمايز من البداية إلى النهاية. وقد اقترحت ورقة بحثية نشرتها مجموعة من جامعة مونتريال وجامعة كارنيجي ميلون في مؤتمر ICRA 2020 حلاً لهذه المشكلة.
∇SLAM، حل مشكلة عنق الزجاجة لخوارزمية SLAM الكلاسيكية
في الوقت الحاضر، تتضمن خوارزميات SLAM الكلاسيكية Kinect-Fusion و PointFusion و ICP-SLAM.ومع ذلك، نظرًا لأن العديد من مكونات هذه الأساليب غير قابلة للاشتقاق، فإن التعلم التمثيلي لـ SLAM كان دائمًا مشكلة مفتوحة. وقد أصبح هذا أيضًا بمثابة عنق زجاجة يعوق تطوير SLAM.
ولحل مثل هذه المشاكل، بدأ العديد من الباحثين في استخدام التعلم العميق. ومع ذلك، فإن معظم هذه الدراسات تقتصر على مجموعات البيانات الافتراضية أو بيئات محددة، بل وتضحي بالكفاءة من أجل الدقة. لذلك، فهي ليست عملية بما فيه الكفاية.
في شهر مايو من هذا العام، في مؤتمر ICRA 2020 (المؤتمر الدولي للروبوتات والأتمتة)، وهو مؤتمر مهم في مجال الروبوتات والذكاء الاصطناعي، نشر فريق من جامعة مونتريال وجامعة كارنيجي ميلون ورقة بحثية"∇SLAM: SLAM الكثيف يلتقي بالتمايز التلقائي"، تم اقتراح حل للمشكلة المذكورة أعلاه.
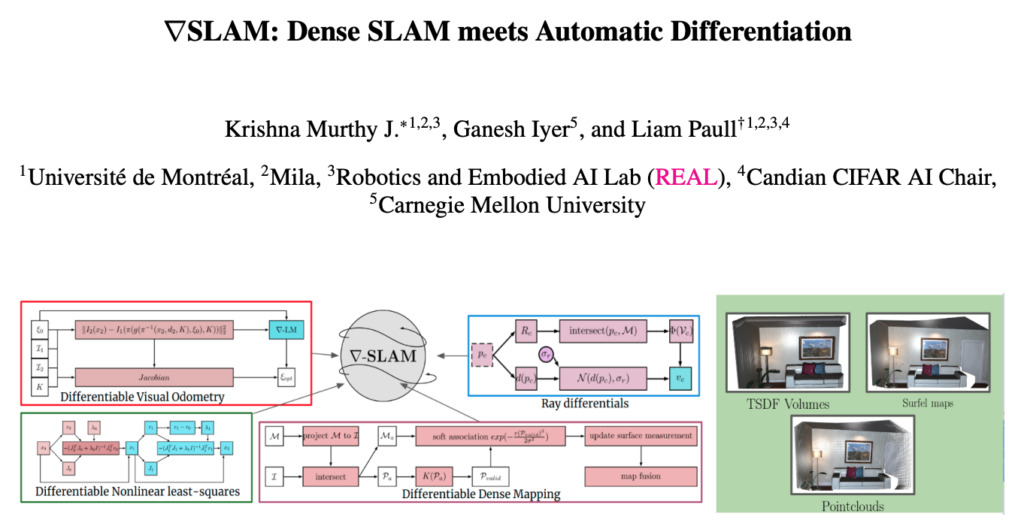
يشير المؤلف إلى أنه في نظام رسم الخرائط الكثيفة لـ SLAM، مثل مشاكل التحسين ومشاكل البث الشعاعي، هناك العديد من الوحدات التي لا يمكن التفاضل بينها، مما يجعل أيضًا طريقة التدرج غير ناجحة جدًا في SLAM.
ردًا على ذلك، اقترح المؤلفون gradslam (∇SLAM) في الورقة، وهو رسم بياني حسابي قابل للتفاضل على SLAM. باستخدام دالة التمايز التلقائية للرسم البياني الحسابي، يسمح GradSlam (∇SLAM) بالتعلم القائم على التدرج بين كل مكوناته أو النظام بأكمله.

إن نظام SLAM القابل للتفاضل بالكامل من شأنه تمكين التعلم التمثيلي الموجه بالمهمة، حيث يمكن نشر إشارة الخطأ التي تمثل أداء المهمة مرة أخرى من خلال نظام SLAM إلى بيانات مراقبة المستشعر الخام.
وكانت النتيجة النهائية هي أن الفريق صمم محسنًا لمنطقة الثقة القابلة للتفاضل، وقياسًا للسطح ومخططًا للاندماج، والتفاضل عبر الأشعة دون التضحية بالأداء.يتيح لنا هذا الاندماج بين SLAM الكثيف والرسومات الحسابية العودة من الخرائط ثلاثية الأبعاد إلى وحدات البكسل ثنائية الأبعاد، مما يفتح إمكانيات جديدة لتعلم SLAM القائم على التدرج.
يذكر المؤلفون أن إطار عمل gradslam (∇SLAM) قابل للتعميم للغاية ويمكن تمديده إلى أي نظام SLAM موجود وجعله قابلاً للتفاضل.
الطريقة التفاضلية تجعل إعادة بناء ثلاثية الأبعاد أفضل
قام الفريق بتنفيذ طرق SLAM النموذجية ICP-Odometry، وICP-SLAM، وKinect-Fusion، وPointFusion كرسوم بيانية حسابية قابلة للتفاضل، وقاموا بتحليل المقارنة بين كل طريقة ونظيرتها غير القابلة للتفاضل.
وتظهر النتائج أن:إنه يعمل بشكل جيد في رسم الخرائط ICP-Odometry وICP-SLAM، مع وجود خطأ المسار المطلق وخطأ الوضع النسبي على مستوى منخفض.كما هو موضح في الجدول التالي:

العنوان الرسمي للمشروع:
https://github.com/gradslam/gradslamيمكنك تجربته وتجربة مزايا حل gradslam (∇SLAM).
بالإضافة إلى Github، وجدنا أيضًا خدمة محلية يسهل تشغيلها. أطلقت منصة خدمة حاويات قوة الحوسبة OpenBayes أيضًا برنامجًا تعليميًا لتدريب النموذج، والذي يمكن تشغيله مباشرة في JupyterNotebook.
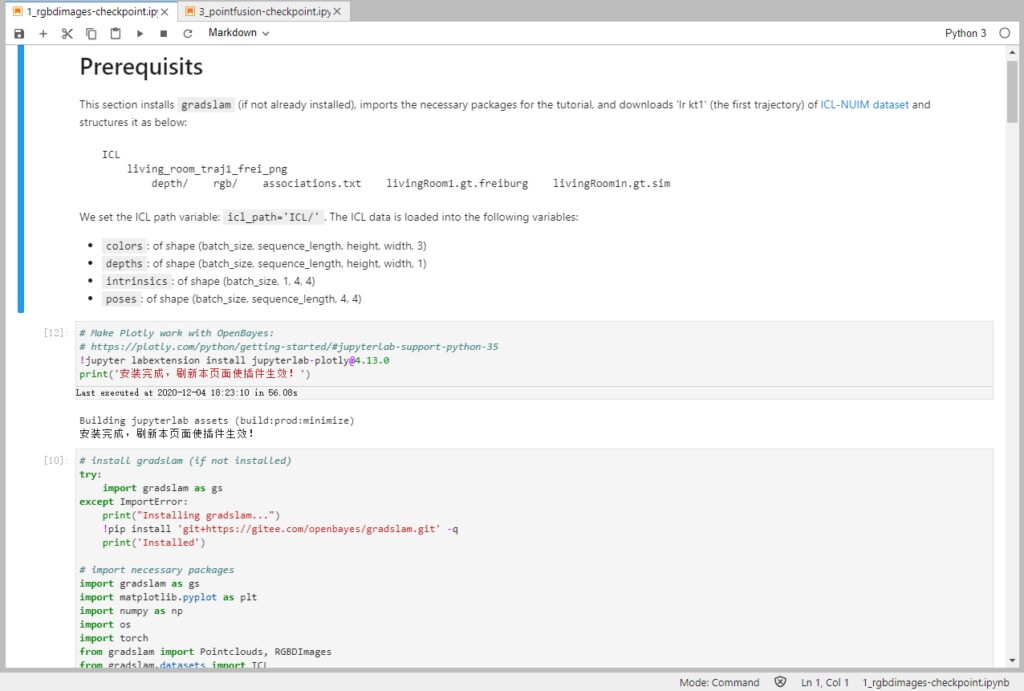
فقط بحاجةوصول openbayes.com من خلال التسجيل، يمكنك الحصول على مجموعة متنوعة من موارد قوة الحوسبة مثل وحدة المعالجة المركزية، وبطاقة الرسومات NVIDIA T4، وبطاقة الرسومات NVIDIA Tesla V100، وما إلى ذلك. حاليًا، يتم إصدار حصص مجانية من قوة الحوسبة إلى حسابك كل أسبوع خلال فترة الاختبار الداخلية.
بالإضافة إلى توفير حاويات طاقة حوسبة متنوعة، يوفر OpenBayes أيضًا مجموعات بيانات عامة ونماذج مدربة مسبقًا وJupyter Notebooks للعديد من المشاريع الشائعة، والتي يمكن تشغيلها بنقرة واحدة لسهولة التشغيل.
تعليمات التسجيل
- قم بزيارة openbayes.com
- مع رمز الدعوة: HyperAI
سجل كمستخدم جديد للحصول على
- حصة وحدة المعالجة المركزية المجانية:300 دقيقة/أسبوع
- حصة vGPU المجانية:180 دقيقة/أسبوع
تعليمات تشغيل Gradslam (∇SLAM)
- بعد تسجيل openbayes
- الوصول إلى وحدة التحكم - البرنامج التعليمي العام
تعتبر تقنية SLAM من التقنيات الرائدة في مجال تكنولوجيا تحديد المواقع المكانية في المجال البصري. من الطائرات بدون طيار إلى القيادة غير المأهولة، ومن الروبوتات الكانسة إلى مجالات الواقع الافتراضي والواقع المعزز، يمكن رؤية SLAM في هذه المجالات الشعبية.
لذا، إذا كنت تريد أيضًا معرفة أحدث نتائج الأبحاث العلمية في مجال SLAM، فقد يكون من الأفضل أن تدرس مشروع gradslam (∇SLAM) في نهاية هذا الأسبوع.
عنوان الورقة:
عنوان مشروع GitHub:
https://github.com/gradslam/gradslam
عنوان دفتر ملاحظات Jupyter Gradslam (∇SLAM):
https://openbayes.com/console/openbayes/containers/HoveymNsfrT