Command Palette
Search for a command to run...
{Jens Behley Ignacio Vizzo Cyrill Stachniss Andres Milioto}
초록
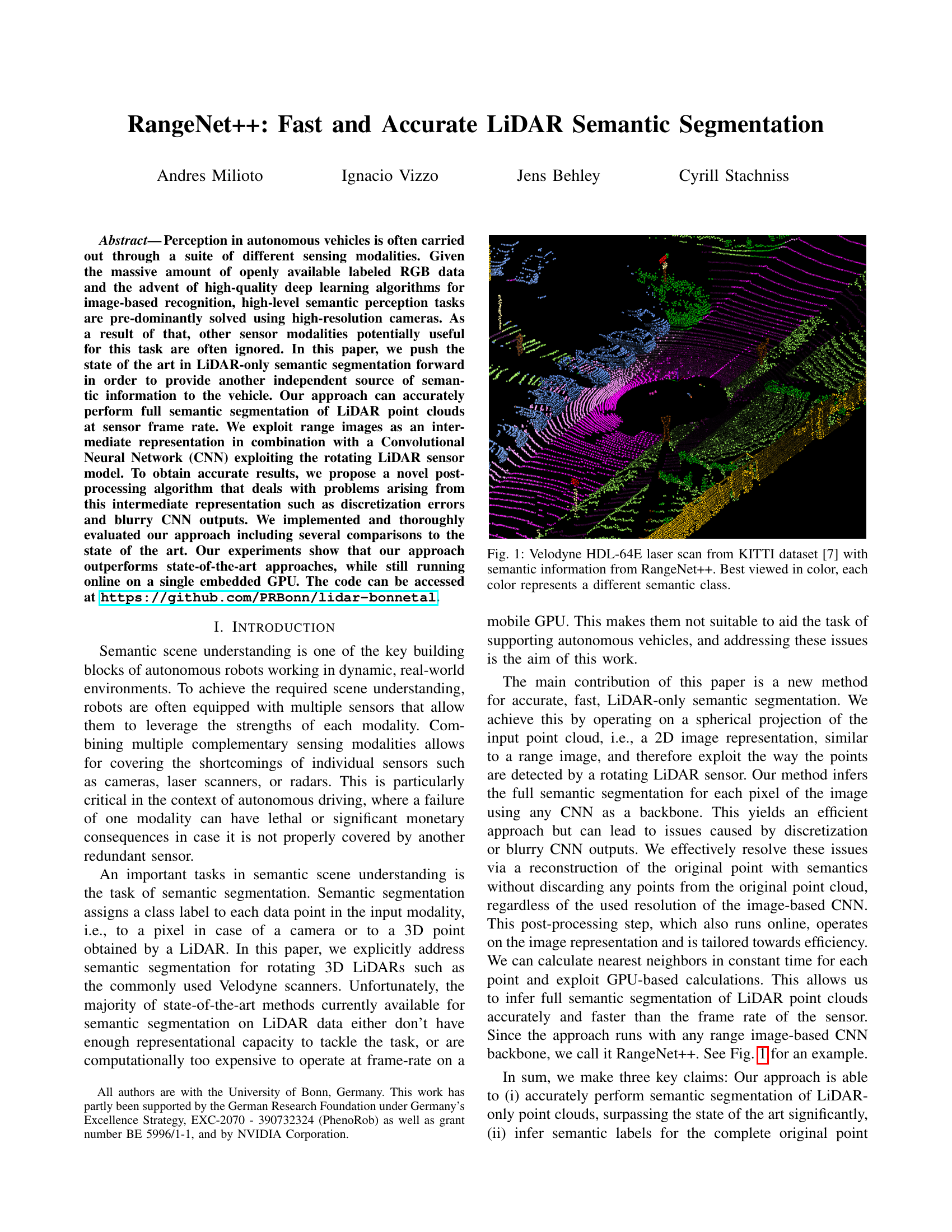
자율주행 차량에서 인지(perception) 작업은 일반적으로 다양한 센서 모달리티를 병행하여 수행된다. RGB 이미지 데이터의 방대한 양의 공개 라벨 데이터와 이미지 기반 인식을 위한 고성능 딥러닝 알고리즘의 등장으로 인해, 고수준의 의미론적 인지 작업은 주로 고해상도 카메라를 통해 해결되고 있다. 이러한 흐름으로 인해, 이 작업에 유용할 수 있는 다른 센서 모달리티는 종종 간과되고 있다. 본 논문에서는 LiDAR만을 이용한 의미론적 세그멘테이션 기술의 최신 기술 수준을 향상시켜, 차량에 또 다른 독립적인 의미 정보 소스를 제공하고자 한다. 제안하는 방법은 센서 프레임 레이트에서 LiDAR 포인트 클라우드의 전체적인 의미론적 세그멘테이션을 정확하게 수행할 수 있다. 이를 위해 회전하는 LiDAR 센서 모델을 활용하는 컨볼루션 신경망(CNN)과 결합하여 거리 이미지(range image)를 중간 표현으로 활용한다. 정확한 결과를 얻기 위해, 이러한 중간 표현에서 발생하는 문제(예: 이산화 오차 및 CNN 출력의 흐림 현상)를 해결하기 위한 새로운 후처리 알고리즘을 제안한다. 제안한 방법은 구현 및 철저한 평가를 수행하였으며, 최신 기술들과의 여러 비교를 포함하고 있다. 실험 결과, 제안한 방법은 기존 최고 수준의 접근법을 능가함과 동시에 단일 임베디드 GPU에서 실시간으로 실행 가능함을 확인하였다. 코드는 다음 주소에서 접근할 수 있다: https://github.com/PRBonn/lidar-bonnetal
벤치마크
| 벤치마크 | 방법론 | 지표 |
|---|---|---|
| 3d-semantic-segmentation-on-semantickitti | RangeNet++ | test mIoU: 52.2% |
| robust-3d-semantic-segmentation-on | RangeNet-21 (64x2048) | mean Corruption Error (mCE): 136.33% |
| robust-3d-semantic-segmentation-on | RangeNet-53 (64x2048) | mean Corruption Error (mCE): 130.66% |