Command Palette
Search for a command to run...
画像による地理位置情報の画期的な進歩!メイン大学、Google、OpenAIなどがLocDiffフレームワークを提案し、グリッドや参照ライブラリを必要とせずに正確なグローバル測位を実現しました。
コンテキスト情報から地理的位置を推定する位置デコード技術は、軌跡合成、建物の輪郭線セグメンテーション、画像ジオロケーションなどで広く利用されています。中でも、画像コンテンツと地理座標を関連付ける画像ジオロケーションは、重要な研究対象となっています。画像の特徴を分析することで緯度と経度の座標を予測し、野生生物のモニタリングや都市のストリートビューなどのデータに適しています。
しかし、成熟した画像分類タスクとは異なり、画像の地理位置情報は複雑な非線形マッピング問題に直面しており、正確なモデリングが困難です。初期の研究では、画像の特徴を緯度と経度に直接マッピングする回帰モデルが用いられていましたが、これらのモデルは安定性が低く、予測誤差が地球規模で数百キロメートルに達することもよくありました。この問題を克服するために、研究者らは「離散化トランスダクション」法を提案し、地理位置情報タスクを分類または検索問題へと変換しました。しかし、これらの手法は空間解像度と地理的範囲の点で依然として限界があります。
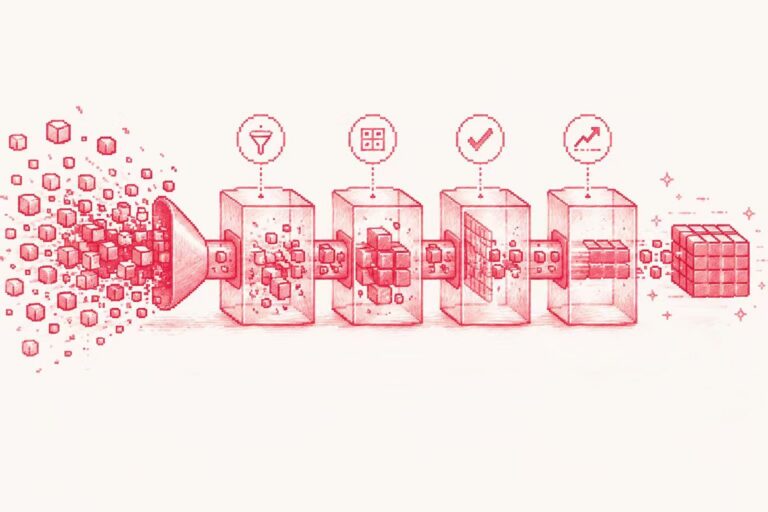
近年、拡散モデルに代表される生成技術は、連続的なデータ分布をモデル化する優れた能力により、地理位置情報研究に新たな道を切り開いてきました。これに基づき、メイン大学、テキサス大学、ジョージア大学、メリーランド大学、Google、OpenAI、ハーバード大学の共同チームが革新的なアプローチを提案しました。従来の生成方法が失敗する根本的な理由は、地理座標の空間特性が従来のデータのものと異なるためであることが判明しました。座標はユークリッド空間ではなく埋め込みリーマン多様体に位置し、ノイズを直接適用すると投影の歪みが生じます。同時に、元の座標にはマルチスケールの空間情報が欠けており、複雑な分布のモデリングをサポートすることが困難です。これら2つの大きな課題に対処するため、研究チームは「球面調和関数ディラックデルタ(SHDD)」と統合フレームワークLocDiffを提案しました。球面形状に適応した符号化手法と拡散アーキテクチャを構築することで、プリセットグリッドや外部画像ライブラリに依存せずに正確な位置検出を実現し、この分野に画期的な技術的道筋を示しました。
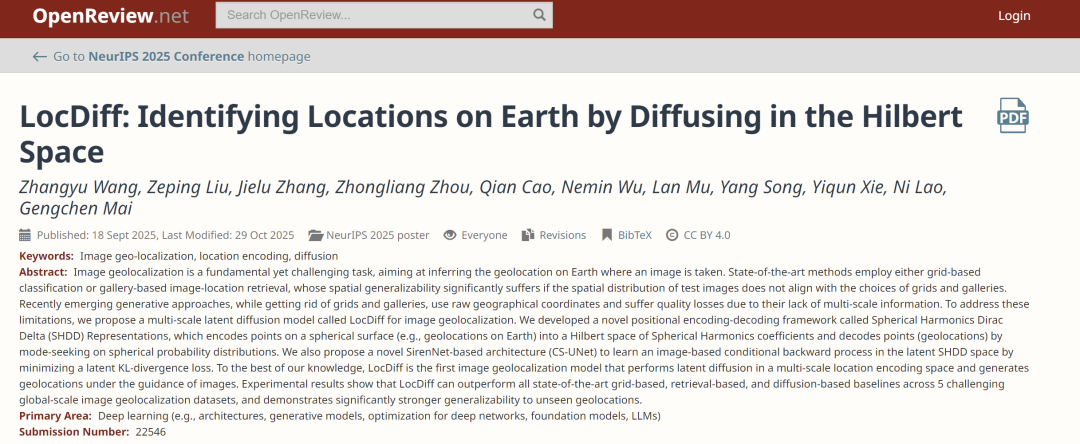
「LocDiff: ヒルベルト空間での拡散による地球上の位置の特定」と題された関連研究成果は、NeurIPS 2025 に掲載されています。
用紙のアドレス:
https://openreview.net/forum?id=ghybX0Qlls
弊社の公式 WeChat アカウントをフォローし、バックグラウンドで「LocDiff」と返信すると、完全な PDF を入手できます。
AIフロンティアに関するその他の論文:
https://hyper.ai/papers
データセット: GeoCLIP に基づいて、このデータセットは 3 つの主要な世界規模の典型的な画像地理位置情報データセットを拡張します。
研究結果の比較可能性と信頼性を確保するため、研究者らは、画像地理位置情報の分野で広く使用されている GeoCLIP モデルのベンチマーク設定に従いました。トレーニング フェーズでは、正確な地理的注釈が付いた 472 万枚の画像を含む MP16 データセット (MediaEval Placing Tasks 2016) が使用され、モデル トレーニングに十分なデータ サポートが提供されます。テスト段階では、Im2GPS3k、YFCC26k、GWS15k という 3 つの典型的な地球規模の画像地理位置情報データセットが選択されました。
なお、テストセットIm2GPS3kとYFCC26kは、データ分布の点でトレーニングセットMP16と非常に類似しており、一部の画像が重複している可能性があることに注意してください。この特性により、検索ベースの手法(GeoCLIPなど)はマッチング処理において一定の優位性を得ることができ、検索精度の向上に役立ちます。モデル推論の段階で、研究者は GeoCLIP や SimCLR などの主流モデルで使用される戦略を採用し、各テスト画像に対して 16 個の強化バージョンを生成し、複数のサンプリングの地理的な中心を最終的な予測位置として使用しました。この戦略により、モデルのパフォーマンスが大幅に向上します。例えば、比較実験では、画像強調と結果の平均化のステップを削除すると、Im2GPS3kデータセットにおけるGeoCLIPの1キロメートルスケールの測位精度は14%から10%未満に低下します。
本研究では、異なる空間スケールにおけるモデルの位置推定能力を包括的に評価するため、街路レベル(1 km)、都市レベル(25 km)、地域レベル(200 km)、国レベル(750 km)、大陸レベル(2,500 km)の5つの評価レベルを設定しました。モデルの性能は、実際の位置の近傍に含まれるサンプルの割合を統計的に予測することで定量化されました。
LocDiff: 球面位置を生成するための潜在拡散モデル
LocDiffモデルの中核的な目的は、球面位置生成に適応した潜在拡散フレームワークを構築することです。その中核となるアイデアは、スパース性と非線形性の問題を克服できる位置エンコーディング空間を構築することです。具体的には、球面調和ディラック関数(SHDD)エンコーディング・デコーディングフレームワーク、条件付きSiren-UNet(CS-UNet)アーキテクチャ、そして効率的な計算戦略を深く統合することでこれを実現します。
技術的な方向性を明確にするため、本研究ではまず、理想的な位置エンコーディング空間が備えるべき中核特性を数学的に定義します。座標空間Cを、角座標(θ, φ)を用いてパラメータ化された3次元ユークリッド空間に埋め込まれた単位球面とします。理想的な位置エンコーダPEは、Cから高次元空間ℝ^dへの単射関数でなければなりません(エンコーディングの一意性を保証する)。一方、デコーダPDは、ℝ^dからCへの射影関数でなければなりません(デコードの整合性を保証する)。さらに重要なのは、エンコーディング空間が連続差分メトリックℰによって密に満たされている必要があり、デコーダは「エンコーディング空間における小さな摂動は球面座標にわずかな変化しか与えない」という安定性要件を満たす必要があることです。これら2つの特性は、既存の技術的ボトルネックを克服するための鍵となります。
しかし、既存の方法では、上記の目標を達成する際に二重のジレンマに直面しています。位置エンコーディング空間自体がスパースである場合、拡散モデルはその中で安定した拡散プロセスを実行することが困難になり、トレーニングの収束が困難になり、デコード精度が低下します。代わりに密な位置埋め込み空間を使用すると、拡散プロセスのスムーズな進行をサポートできますが、位置エンコーディングと座標空間間の高度に非線形なマッピングにより、「埋め込み結果から正しい地理座標を推測する」タスクが行き詰まりに陥ります。つまり、埋め込み空間での距離を最小化することが、地理空間での距離を最小化することに対応できないことがよくあります。
この課題を克服するために、研究者は SHDD エンコード方式を提案しました。この革新的なアプローチでは、まず球面点 (θ₀, φ₀) を球面調和ディラック関数 δ_(θ₀, φ₀) に変換し、次にこの関数を球面調和関数の係数ベクトルにエンコードすることで、最終的にSHDD表現を形成します。実用化においては、球面調和関数の最大次数 L を設定することで、理論上無限次元となる係数ベクトルをコンパクトな (L+1)² 次元表現に切り捨てることができます。さらに、L の値が大きいほど、表現によって捕捉される空間情報はより精緻になり、マルチスケールの位置決め要件に柔軟に対応できるようになります。
SHDDエンコーディング空間は本質的に稠密であり、その中の各点eは球面関数Fₑに一意に対応する。この関数と実位置に対応する球面調和ディラック関数δ_(θ₀, φ₀)との差は、逆KLダイバージェンスによって定量化される。この差の尺度ℰは、本研究に必要な連続的な指標である。さらに重要なのは、SHDD KL ダイバージェンスと Wasserstein-2 距離には明確な制約関係があり、これによりコーディング空間の違いと球面確率分布の違いの間の一貫性が数学的に保証され、デコードの安定性の基盤が築かれることです。一方、SHDDエンコーディングは、従来の手法における非線形性の問題を効果的に解決します。関連するヒートマップの比較から、従来の埋め込み手法と比較して、SHDDで測定された球面距離はより滑らかであることがわかります。この滑らかさは、デコードプロセスにおけるエラー伝播のリスクを大幅に低減し、正確な測位を保証します。

SHDD 表現の特性に基づいて、研究者は効率的なデコードを実現するためのモダリティ検索デコーダーを設計しました。このデコーダーは、逆KLダイバージェンスのモード探索特性を利用し、球面関数の確率質量が最も集中する領域を見つけることで座標反転を実行します。ハイパーパラメータρは、デコード解像度と安定性のバランスをとるために使用されます。ρ値が大きいほど、デコード結果は局所的なピークの影響を受けにくくなりますが、精度は粗くなります。一方、ρ値が小さいほど精度は向上しますが、局所的なノイズの影響を受けやすくなります。このパラメータレス設計には、デコード段階での追加損失を回避し、事前定義された球面分割や外部参照画像ライブラリへの依存を完全に排除することで、従来の手法の適用上の制限を打ち破るという2つの利点があります。
LocDiffの条件生成バックボーンネットワークであるCS-UNetアーキテクチャは、下図に示すように、SirenNetをベースモジュールとして採用しています。これは、球面調和関数の係数が本質的に正弦関数と余弦関数の重ね合わせであり、SirenNetの正弦波活性化関数が勾配フローを効果的に維持し、球面調和関数特徴の伝播要件に適応できるという事実に由来しています。CS-UNetの中核ユニットであるC-Sirenは、洗練された特徴融合メカニズムを通じて効率的な条件付きノイズ除去を実現します。潜在ベクトルx、画像条件埋め込みe_I、拡散ステップtを入力すると、まずxとe_Iが隠れベクトルに投影され、次に離散拡散時間ステップtがスケールベクトルとオフセットベクトルに変換され、無条件ノイズ除去が完了します。最後に、画像条件とノイズ除去特徴が融合され、調整された特徴が出力されて次のレベルのモジュールに渡され、完全な条件付きガイダンスチェーンが形成されます。

LocDiffの学習プロセスは標準的なDDPMフレームワークに準拠し、「画像-球面位置」を学習サンプルペアとして使用します。まず、画像は固定されたCLIPエンコーダを介して固定次元の埋め込み表現e_Iに変換され、対応する球面位置(θ, φ)がSHDD表現としてエンコードされ、後で使用するために保存されます。順伝播フェーズでは、球面調和ディラック関数にノイズが徐々に追加され、純粋なガウスノイズベクトルに変換されます。逆伝播フェーズでは、CS-UNetは画像埋め込みe_Iに基づいて、ノイズベクトルから元のSHDD表現を徐々に復元します。学習に使用される損失関数はSHDD KLダイバージェンスです。これは、従来の球面MSE損失と比較して、数値的に安定しているだけでなく、マルチスケール空間情報を効果的に保持するため、モデルがグローバルおよびローカルな特徴を学習するのに役立ちます。
推論フェーズでは、モデルはランダムガウスノイズから開始し、入力画像に埋め込まれた特徴に基づいて、CS-UNetを介してSHDD係数ベクトルを徐々に生成します。これらのベクトルは、モダリティサーチデコーダーを介して球面座標(θ, φ)に変換されます。実際のエンジニアリング実装では、SHDD KLダイバージェンスの計算とモダリティサーチの積分演算は、離散的な球面アンカーポイントセットを合計することで近似されます。トレーニング中は、過学習を回避するために、アンカーポイントはグローバルにランダムにサンプリングされます。
LocDiff は 3 つの主要な側面に焦点を当てており、ほとんどのテスト シナリオで非常に優れたパフォーマンスを発揮します。
LocDiffモデルの性能を体系的に評価するため、本研究では、位置推定精度、汎化能力、計算効率という3つの側面から実験を行いました。公平な比較を行うため、すべての実験はドメイン標準の設定に準拠しました。
実験の結果、以下の表に示すように、LocDiffはほとんどのテストシナリオで優れたパフォーマンスを発揮することが示されています。細粒度でのパフォーマンスをさらに向上させるため、研究者らはハイブリッドモデルであるLocDiff-Hを設計しました。このモデルは、GeoCLIPの取得範囲をLocDiffで生成された位置情報の半径200キロメートルに制限することで、2つの手法の利点を効果的に組み合わせています。LocDiff-HはIm2GPS3kとYFCC26kでは優れたパフォーマンスを発揮しますが、GWS15kでは、特に細粒度スケールにおいて、オリジナルのLocDiffに遅れをとります。これは主に、GWS15kとトレーニングセットの間に大きな分布の違いがあり、それがGeoCLIPの帰納的バイアスに悪影響を与えているためです。

下の表に示すように、類似の生成モデルと比較すると、LocDiff は OSM-5M と YFCC-4k データセットの両方で DiffR³、FMR³、およびその他の同等のモデルよりも優れており、マルチスケール潜在拡散法の利点が実証されています。

汎化分析により、生成手法の独自の価値が明らかになりました。検索ベースのGeoCLIPは、地図リポジトリの空間範囲に大きく依存しています。テストセットの分布がトレーニングセットと一致しない場合、パフォーマンスは著しく低下します。候補地として数百万の均一グリッドポイントを使用した場合でも、200キロメートル以上のスケールでは、元の地図リポジトリを使用した場合に比べてパフォーマンスが大幅に低下します。これは、この手法が未知の場所への適応性が限られていることを反映しています。
対照的に、LocDiffは堅牢な汎化能力を示しています。以下の表に示すように、実験結果では、アンカーポイントがMP16ライブラリ位置を使用しているか均一なグリッドポイントを使用しているかに関わらず、またアンカーポイントの数が21,000から100万に増加しても、LocDiffのパフォーマンスは安定しており、その堅牢性がさらに裏付けられています。

計算効率の点では、LocDiffは非常に優れたパフォーマンスを発揮します。SHDDエンコード/デコードは、決定論的な閉形式演算であるため、ほぼ一定の時間計算量と線形空間計算量を持ちます。学習中は、SHDDエンコードを埋め込みルックアップテーブルとして事前計算することができ、デコードは効率的な行列乗算とargmax演算によって実装されます。特に、マルチスケールSHDD表現は拡散プロセスの収束を大幅に加速します。LocDiffはYFCCデータセットにおいて、クラス最高のモデルでも1,000万ステップを要したのに対し、わずか約200万ステップで収束します。

画像地理位置情報技術における学術的ブレークスルーと産業的発展
画像地理位置情報技術は、視覚情報と現実世界をつなぐ重要な架け橋として、近年、学術研究と実用化の両面で大きな進歩を遂げています。
学術界では、MITコンピュータ科学・人工知能研究所(CSAIL)の研究チームが、球面位置エンコーディングにおいて画期的な進歩を遂げました。従来の手法における非線形マッピングの課題に対処するため、彼らは球面調和関数と多様体学習を組み合わせた、多様体拡散に基づく改良型手法を提案しました。この革新により、極地や海洋などのデータ密度の低い地域におけるモデルの位置測定性能が大幅に向上し、100kmスケールで23%の精度向上を実現しました。また、適応型スケール調整メカニズムも導入され、地域をまたぐシナリオにおけるモデルの汎化能力が効果的に向上しました。
論文のタイトル:LocDiffusion: 球面調和関数ディラックデルタ空間での拡散による地球上の位置の特定
論文リンク:https://arxiv.org/abs/2503.18142
一方、UAEデジタル大学は、大規模視覚モデルの地理位置推定能力を強化するために設計された、新たな多段階推論パラダイムであるGeoCoTフレームワークを提案しました。GeoCoTは、人間の地理位置推定認知プロセスをシミュレーションすることで、文脈情報と空間的手がかりを段階的に統合することで、測位性能を大幅に向上させます。GeoEval指標に基づく実験では、このフレームワークにより、良好な解釈可能性を維持しながら、地理位置推定精度が最大25%向上することが示されています。
論文のタイトル:実際の人間のゲームプレイデータによる地理位置情報:大規模データセットと人間のような推論フレームワーク
論文リンク:https://arxiv.org/pdf/2502.13759
これらの学術的概念は急速に実用化され、産業界における革新的な実践を推進しています。2023年NASAスタートアップチャレンジの優勝者であるPRISM Intelligenceが開発した地理空間インテリジェンス・プラットフォームはその好例です。このプラットフォームは、放射線場技術を用いて2次元リモートセンシング画像を高忠実度の3次元デジタル環境に変換し、AI駆動型のセマンティックセグメンテーションと動的最適化アルゴリズムを組み合わせることで、地理空間データとの自然言語インタラクションを実現します。
Google Earth チームは、膨大な量のグローバルストリートビューデータでトレーニングされた生成モデルを活用し、画像に基づいた正確な位置予測を実現しました。また、天候や工事などの要因により欠落した画像情報を自動的に補完する技術も開発しました。この技術により、Google Earth のストリートビュー更新の効率が3倍向上し、より遠隔地へのカバレッジが拡大しました。
これらの業界の実践は、学術研究の応用価値を検証するだけでなく、現実世界のシナリオからのフィードバックを通じて理論的革新の新たな方向性を提供し、画像地理位置情報技術の精度、効率、アクセシビリティを継続的に向上させます。
参考リンク:
1.https://science.nasa.gov/science-research/science-enabling-technology/technology-highlights/entrepreneurs-challenge-winner-prism-is-using-ai-to-enable-insights-from-geospatial-data/
2.https://ai.google.dev/competition/projects/prism