Command Palette
Search for a command to run...
浙江大学は SVM を使用して触覚センサーを最適化し、点字認識率は 96.12% に達しました

バイオセンシングは、人間と機械、人間と環境、機械と環境の間の相互作用のための重要な媒体です。その中でも、触覚は正確な環境認識を実現し、ユーザーが複雑な環境と対話するのに役立ちます。
人間の接触を模倣するために、研究者は環境に対する皮膚の認識をシミュレートするさまざまなセンサーを開発しました。しかし、触覚センシングには高い要件と多様なパラメータがあり、多くの研究開発経験、十分な文献調査、多くの試行錯誤実験が必要であり、研究開発サイクルは非常に長いです。
この目的を達成するために、浙江大学の研究者らはサポート ベクター マシンを使用して、摩擦電気ナノ発電機触覚センサーのパラメーターを最適化しました。最適化された触覚センサーは複数のタッチパターンを認識し、点字認識を可能にします。この成果は、触覚センサーの開発に新たなソリューションを提供することが期待されます。
著者 | 雪才
編集者 | 三陽
人間の感覚システムを模倣するために、研究者たちは、接触、圧力、振動、温度、湿度などの情報を監視する一連の皮膚に似たセンサーを開発しました。で、触覚センサーは、複雑な環境と対話する上で最も重要な部分です、健康監視、インテリジェントロボット、人間とコンピューター環境の相互作用、仮想現実/拡張現実で広く使用されています。
理想的なセンサーは、高感度、広い動作範囲、優れた再現性を備えている必要があります。。そのためには、多くの場合、研究開発の経験や文献調査に基づいてセンサー パラメーターを選択し、次に複数の試行錯誤実験を実施し、最終的に最適化されたセンサーを使用して特定のタスクを実行する必要があります。
ただし、このフィードフォワード設計戦略はセンサーの設計とアプリケーションを分離し、データの負担を増大させ、信号特性を弱め、計算分析の効率を低下させます。
図 1: 触覚センサーに基づくモジュール式プロテーゼ (a) と乳房検査センサー (b)
センサー信号認識の安定性を向上させるため、機械学習アルゴリズムは、さまざまなチャネル信号間の相関関係やニュアンスを分析するためによく使用されます。。最近、浙江大学のYang Geng氏とXu Kaichen氏の研究チームはさらに一歩前進しました。摩擦電気ナノ発電機 (TENG) 触覚センサーの設計は、サポート ベクター マシン (SVM) を通じて最適化されました。最適化されたセンサーは 6 つの動的タッチ モードを正確に識別し、それに応じてテキスト認識と点字認識を実行できます。。関連する結果は「Advanced Science」に掲載されています。

関連する結果は「Advanced Science」に掲載されました
論文リンク:
https://onlinelibrary.wiley.com/doi/10.1002/advs.202303949
実験プロセス
概要:最適化パラメータと最適化アルゴリズム
TENG ベースの触覚センサーのパフォーマンスは主に次のパラメーターに関連しています。これには、SVM アルゴリズムによって最適化されるパラメーターである、出力信号の種類、電極密度、表面微細構造の形状および分布が含まれます。
指のセンサーは、押す、タップ、上に移動、下に移動、左に移動、右に移動を含む 6 つのタッチ モードを認識できます。これら 6 つのタッチ パターンの認識はセンサーのテスト ターゲットであり、設計パラメーターの最適化に使用されます。
SVM アルゴリズムは、出力信号の品質を評価し、最適な設計パラメーターを選択するために使用されます。従来のエクスペリエンス主導の設計プロセスとは異なり、SVM 設計プロセスは、デバイス設計とアルゴリズムを密接にリンクするデータ主導型のパラメータ最適化手法を提供します。

図 2: 機械学習ベースの触覚センサーの最適化プロセス
機械学習モデル:SVM+CNN
この研究では、Python で scikit-learn ライブラリを使用して SVM 分類器を取得しました。合計 10 個の分類器があり、正則化パラメーターの範囲は 0.1 ~ 1.0 です。
同時に、PyTorch フレームワークに基づいて、検証プロセスでの特徴学習と認識のために 1 次元畳み込みニューラル ネットワーク (CNN) が Python で開発されました。 CNN は 5 つの畳み込み層で構成され、その後にバッチ正規化関数と修正線形単位 (ReLU) が続きます。モデルは、適応モーメント推定 (Adam) アルゴリズムを通じて、学習率 0.001、バッチ サイズ 128 でトレーニングされます。

図 3: CNN モデルの概略図
製造工程:レーザー直接描画 + PDMS パッケージング
TENG 触覚センサーの製造には主に 6 つのステップが含まれます。
1. 赤外線レーザー直接描画技術により櫛形電極を作成します。レーザーの熱効果によりポリイミド (PI) フィルムの炭化を誘導し、レーザー誘起グラフェン (LIG) パターンを得ることができます。
2. LIG/PI フィルム上にポリジメチルシロキサン (PDMS) をスピンコートします。
3. PDMS溶液がLIGの細孔構造に浸透した後、PIフィルムを剥がしてLIG/PDMSフィルムを得る。
4. 酸素プラズマを使用してフィルムを処理し、電気陰性基を導入し、フィルム表面の不純物を除去します。
5. デバイスの摩擦電気効果を高めるためにパーフルオロエチレンプロピレン共重合体 (FEP) フィルムを導入します。
6. 最後に、PDMS でパッケージ化され、レーザーでパターン化されます。

図 4: TENG 触覚センサーの製造プロセス
出力信号の種類:電流と電圧
出力信号の種類は TENG の検出性能に大きく関係します, そこで研究者らはまず、センサーの性能に対する摩擦電圧と摩擦電流の影響を比較しました。
1 つ目は、両方の出力信号タイプのデータ再現性です。。電流信号の分布は不規則で、平均データからの偏差が大きくなりますが、電圧データは平均データからの偏差が小さく、再現性が高くなります。
さらに、研究者らは線形 SVM 分類器を使用してデータを分類しました。電圧信号の分類精度は 94.278%、電流信号の精度は 95.579% でした。電圧信号と電流信号の分離度と分散はそれぞれ [3,636, 11.877] と [3.528, 11,267] です。
異なる次元からのデータの影響を排除するために、上記の指標は正規化されています、電圧信号の結果は [94,278%, 3.636, 11,877] から [0, 1, 1] に変化し、電流信号の結果は [95,579%, 3.528, 11,267] から [1, 0] に変化します。 、0]。このことから、電圧信号には信号出力に適した 2 つの評価基準があることがわかります。

図 5: 6 つのタッチ モードに対する出力電圧と出力電流の信号応答
a&b: それぞれ 6 つのタッチ モードに対する電圧と電流の信号応答です。
c&d: それぞれ出力電圧信号と電流信号の次元削減結果です。
電極密度:疎と密
電極密度は信号の複雑さに影響します。研究者らは、電極がまばらに配置されている場合と密に配置されている場合のデバイスのパフォーマンスを調査しました。信号の次元を削減した後、まばらに分布した電極信号の方がより大きな識別力を持っていることがわかります。
疎に配置された電極信号の分類精度、分離性、離散性はそれぞれ [96.975%, 3.695, 14.759]、密に配置された電極は [95,958%, 3.528, 11.542] です。正規化するとそれぞれ[1, 1, 1]、[0, 0, 0]となり、まばらに配置された電極信号の評価基準が3つあることがわかります。
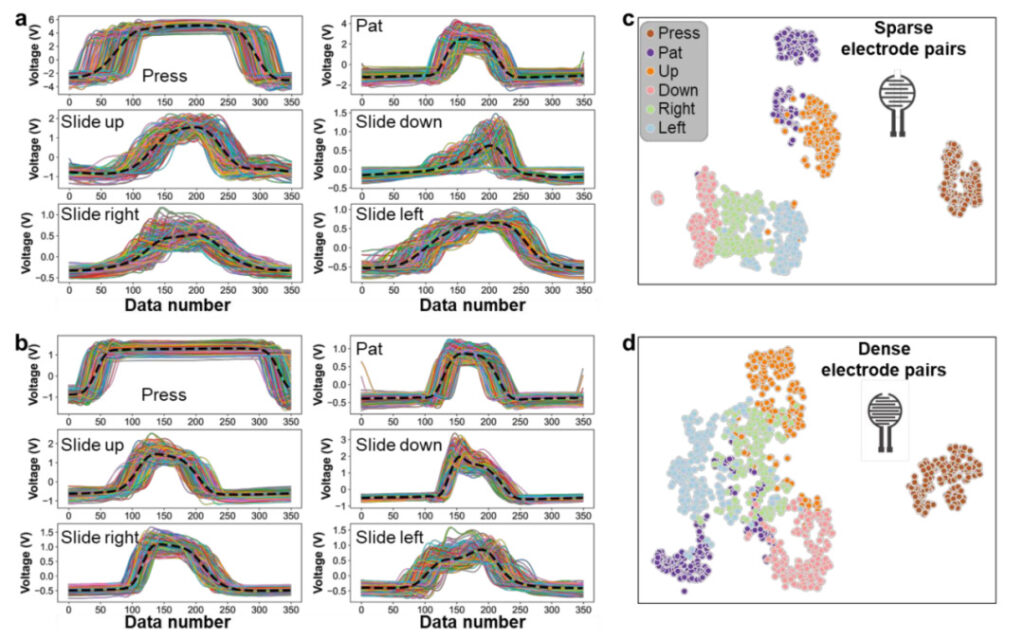
図 6: 6 つのタッチ パターンに対する、まばらに分布した電極と密に分布した電極の信号応答
a&b: 6 つのタッチ モードに対する、まばらに分布した電極と密に分布した電極の信号応答。
c&d: それぞれまばらに分布した電極と密に分布した電極によって記録された信号の次元削減結果。
微細構造形状:指紋とグリッド
PDMS 表面の粗い微細構造により、信号に対する粘性効果の影響が軽減され、信号の S/N 比が向上します。。研究者らは、指紋状の微細構造と格子状の微細構造がデバイスの性能に及ぼす影響を比較したところ、指紋状の構造のデータがより集中しているのに対し、格子状の構造の信号は不安定であることが判明した。
指紋状構造信号と格子状構造信号の精度、分離性、離散性はそれぞれ [96.50%, 4.227, 14.958] と [95.056%, 3.725, 11.783] です。正規化後は [1, 1, 1] と [0, 0, 0] となり、指紋のような微細構造がこの実験により適していることを示しています。

図 7: 6 つのタッチ モードに対する指紋状の微細構造 (a) と格子状の微細構造 (b) の信号応答
微細構造分布:チャンネル間隔
指紋のような微細構造では、隣接するチャネル間の間隔も信号の品質に影響します。。研究者らは、チャネル間隔が 100、200、および 300 μm のデバイスのパフォーマンスを比較しました。3 つの正規化された指標はそれぞれ [1, 0.902, 1]、[0.042, 1, 0]、および [0, 0, 0.228] でした。 、間隔が小さいほど信号出力が促進されることを示します。
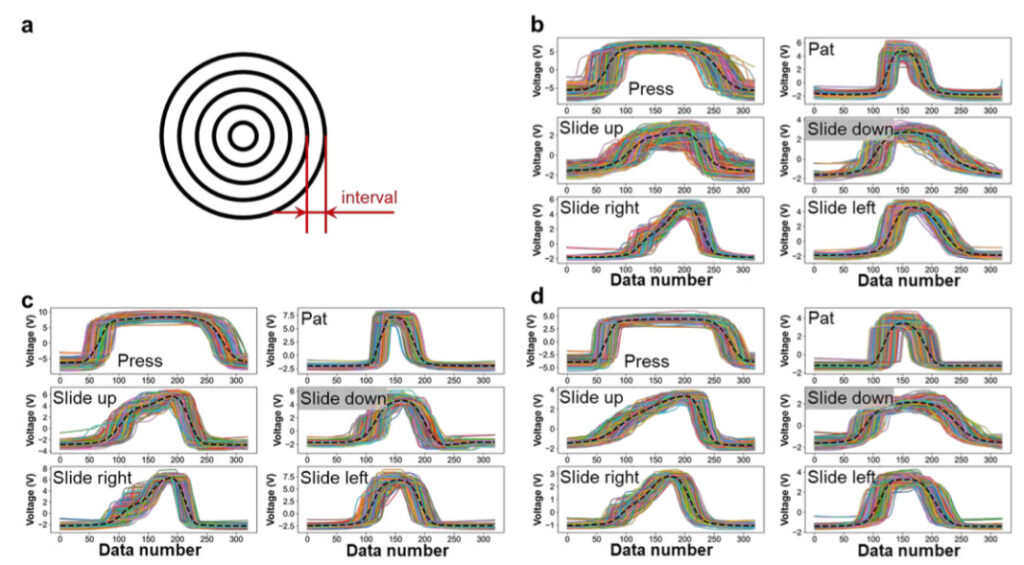
図 8: 異なるチャネル間隔を持つ 6 つのタッチ モードに対する信号応答
a: 指紋状の微細構造のチャネル間隔の概略図。
b&c&d: チャネル間隔がそれぞれ 300 μm、200 μm、100 μm の場合の信号応答です。
SVM 最適化によって取得されるデバイス パラメータは次のように要約されます。

表 1: SVM 最適化パラメータと結果の概要
実験による検証:テキスト認識
SVM アルゴリズムによって最適化されたパラメータのおかげで、TENG 触覚センサーは 6 つのタッチ モードを正確に識別できます。したがって、電圧測定モードでは、TENG 触覚センサーはさまざまな文字を区別できるため、テキスト認識が可能になります。
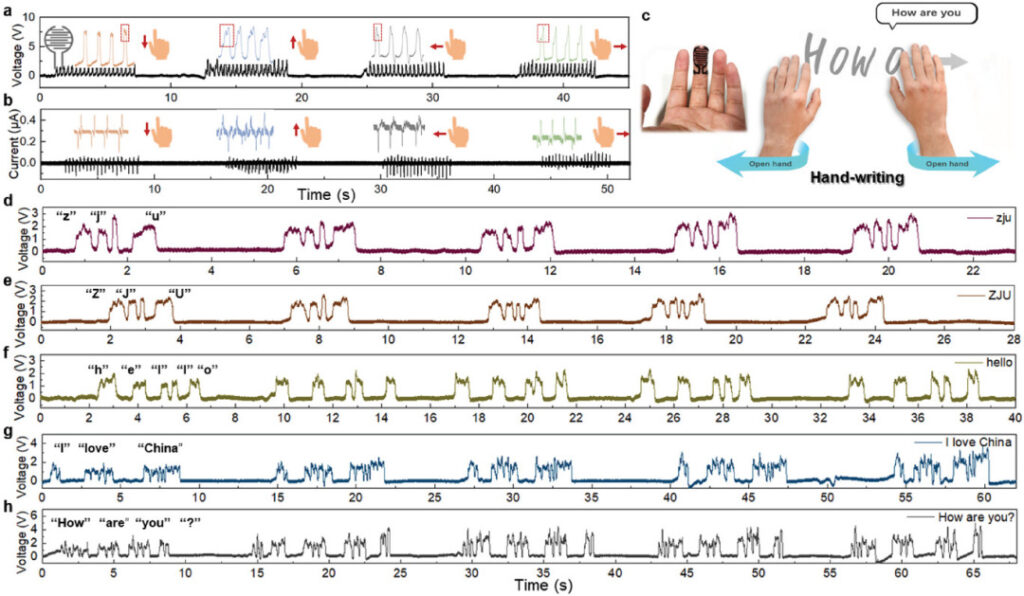
図 9: テキスト認識における TENG 触覚センサーの応用
a&b: それぞれ、上下左右にスライドさせたときの電圧と電流の出力。
c: タッチによるテキスト認識プロセスの概略図。
dh: 異なるセンテンスに対する TENG 触覚センサーの応答信号。
生体認証:点字認識
人間の皮膚の触感特性を模倣するために、上記のTENG触覚センサをロボットハンドに固定し、点字認識テストに使用しました。まず、ロボットハンドにより 10 個の点字番号のタッチ信号が収集されます。その後、ハイパスフィルタリングにより、スライド過程の微弱な信号を抽出します。

図 10: 10 桁の点字のタッチ信号 (左) と次元削減分布 (右)
これらの点字番号は非常に似ており、識別するのが困難です。この目的を達成するために、研究者たちは特徴の学習と分類に CNN を使用しました。 CNNの分類精度は96.12%、類似性の高い 3 つの点字番号 0、3、8 のみ精度が低くなります。
実際のアプリケーションでの実現可能性を検証するために、研究者らはロボットハンドを使用して 11 桁の点字電話番号をリアルタイムで認識しました。一連の点字電話番号を印刷した後、ロボット ハンドは各桁を継続的に認識し、リアルタイムのフィードバックを提供し、グラフィカル ユーザー インターフェイス (GUI) に表示できます。

図 11: 点字電話番号のリアルタイム認識に使用される TENG 触覚センサー
上記の結果は次のことを示していますSVM に最適化された TENG 触覚センサーは、接触を通じてテキストを効果的に認識でき、機械と環境の間の相互作用を強化し、障害者支援のための新しいソリューションを提供することが期待されています。
TENG 触覚センサー
最も初期のバイオセンサーは、抗原抗体免疫反応または DNA 二本鎖反応に基づいて構築されました。これらのセンサーは非常に正確ですが、主に分子生物学で使用されており、大規模な生物学的モニタリングを行うのは困難です。
「モノのインターネット」という概念が提唱されてから、研究者が高スループット、低コストの大規模バイオセンサーの開発を開始、触覚センサーを含む一連の環境センサーが登場しました。

図 12: バイオセンサーの開発の歴史
初期の触覚センサーは、抵抗、静電容量、圧電効果、熱電効果などに基づいて設計されました。これらのコンポーネントによりセンサーのサイズが大幅に増大し、複数のシナリオでの使用が制限されます。。
2012年にTENGが提案されてから、触覚センサの研究開発は新たな段階に入った。ナノスケール TENG は、さまざまなフレキシブル基板に埋め込んでウェアラブル センサーを形成することができ、これが電子スキンなどの概念につながりました。
ただし、従来の TENG 触覚センサーの開発は、主に研究チームの経験、文献調査、および複数の試行錯誤に依存しています。今、AI の助けを借りて、TENG 触覚センサーの研究開発は経験主導型からアプリケーション主導型に移行することができ、これにより研究開発サイクルとコストが大幅に削減され、研究開発の実施が加速され、TENG 触覚センサーの統合が促進されます。需要側との連携を図り、人々の生活にさらなる利便性を提供します。
参考リンク:
[1]https://www.mdpi.com/1424-8220/17/11/2653
[2]https://onlinelibrary.wiley.com/doi/full/10.1002/adma.202008276








