Command Palette
Search for a command to run...
Gradslam (∇SLAM) オープンソース: すべての論文とコードが利用可能

モントリオール大学とカーネギーメロン大学のチームが ICRA 2020 で発表した論文で提案した ∇SLAM は、現在の SLAM システムが一般的に直面している未解決の問題を解決します。
ここ2年で自動運転やドローンなどのスマートデバイスの急速な発展に伴い、その基幹技術の一つであるSLAM(Simultaneous Localization And Mapping、中国語訳:測位と地図の同時構築)も有名になりました。
SLAMの開発には30年以上の歴史があり、未知の環境において機械が状態を認識・推定し、自律的に動作するための重要な技術であると言えます。マシンは経路計画やナビゲーションなどのタスクを実行する必要があり、AR と VR は安定した 3 次元空間を構築します。これらのテクノロジーは SLAM の支援と切り離せません。
平たく言えば、SLAM は 2 つの質問に答えます。「私はどこにいるの?」「私の環境には何があるの?」
たとえば、掃除ロボットは、SLAM テクノロジーと組み合わせた LIDAR またはカメラを利用して、部屋の隅がどのように配置されているかを把握し、環境マップを作成し、この情報に基づいて独自の掃除経路を計画します。

しかし、長年の開発を経ても、従来の SLAM アルゴリズムは依然としてエンドツーエンドの非微分可能性という未解決の問題に直面しており、ICRA 2020 でモントリオール大学とカーネギーメロン大学のチームが発表した論文では、この問題の解決策が提案されています。 。
∇SLAM、古典的な SLAM アルゴリズムのボトルネック問題を解決
現在、古典的な SLAM アルゴリズムには、Kinect-Fusion、PointFusion、ICP-SLAM などが含まれます。ただし、これらの手法の多くのコンポーネントは微分不可能であるため、SLAM の表現学習は常に未解決の問題でした。これもSLAMの開発を妨げるボトルネックとなっている。
このような問題を解決するために、多くの研究者がディープラーニングを使い始めました。ただし、これらの研究のほとんどは仮想データセットまたは特定の環境に限定されており、精度のために効率も犠牲になっています。したがって、それらは十分に実用的ではありません。
今年5月、ロボット工学と人工知能分野の重要な会議であるICRA 2020(ロボット工学とオートメーションに関する国際会議)で、モントリオール大学とカーネギーメロン大学のチームが論文を発表した。「∇SLAM: 高密度 SLAM と自動微分が融合」、上記の問題の解決策を提案しました。
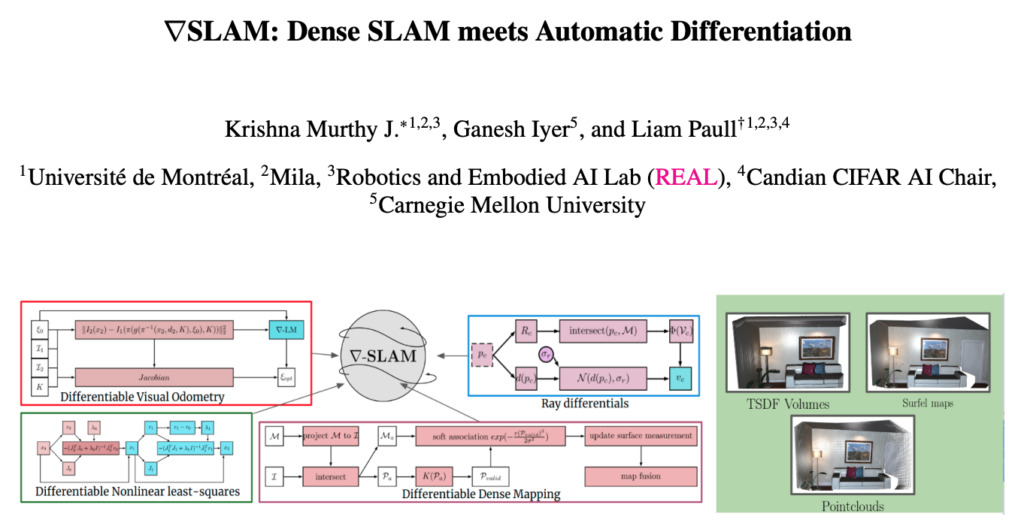
著者は、最適化問題やレイキャスト問題など、SLAM の密なマッピング システムには区別できないユニットが多数存在し、それが勾配ベースの手法が SLAM で大きな成功を収める妨げになっていると指摘しています。
これに関連して、著者は論文の中で、SLAM 上の微分可能な計算グラフである gradslam (∇SLAM) を提案しました。計算グラフの自動微分機能を利用して、 gradslam (∇SLAM) を使用すると、各コンポーネント間またはシステム全体の間で勾配ベースの学習が可能になります。

完全微分可能な SLAM システムでは、タスクのパフォーマンスを表す誤差信号が SLAM システムを介して生のセンサー観測データに逆伝播できるため、タスク駆動型の表現学習が可能になります。
最終的な結果として、チームはパフォーマンスを犠牲にすることなく、微分可能な信頼領域オプティマイザー、表面測定と融合スキーム、および光微分を設計しました。この高密度 SLAM と計算グラフィックスの融合により、3D マップから 2D ピクセルまで遡ることが可能になり、勾配ベースの SLAM 学習の新たな可能性が開かれます。
著者は、gradslam (∇SLAM) のフレームワークは非常に一般的であり、既存の SLAM システムに拡張して微分可能にすることができると述べています。
微分可能な手法により 3D 再構成がより適切になります
研究チームは、代表的な SLAM 手法である ICP-Odometry、ICP-SLAM、Kinect-Fusion、PointFusion を微分可能な計算グラフとして実装し、各手法と微分不可能な手法との比較を分析しました。
結果は次のとおりです。ICP-Odometry および ICP-SLAM マッピングでは良好なパフォーマンスを示し、絶対軌道誤差と相対姿勢誤差の両方が低いレベルを示しています。次の表に示すように:

プロジェクトの正式アドレス:
https://github.com/gradslam/gradslamを実践して、gradslam (∇SLAM) ソリューションの利点を実感してください。
Github に加えて、コンピューティング パワー コンテナ サービス プラットフォーム OpenBayes も、Jupyter Notebook で直接実行できるこのモデルのトレーニング チュートリアルを開始しました。
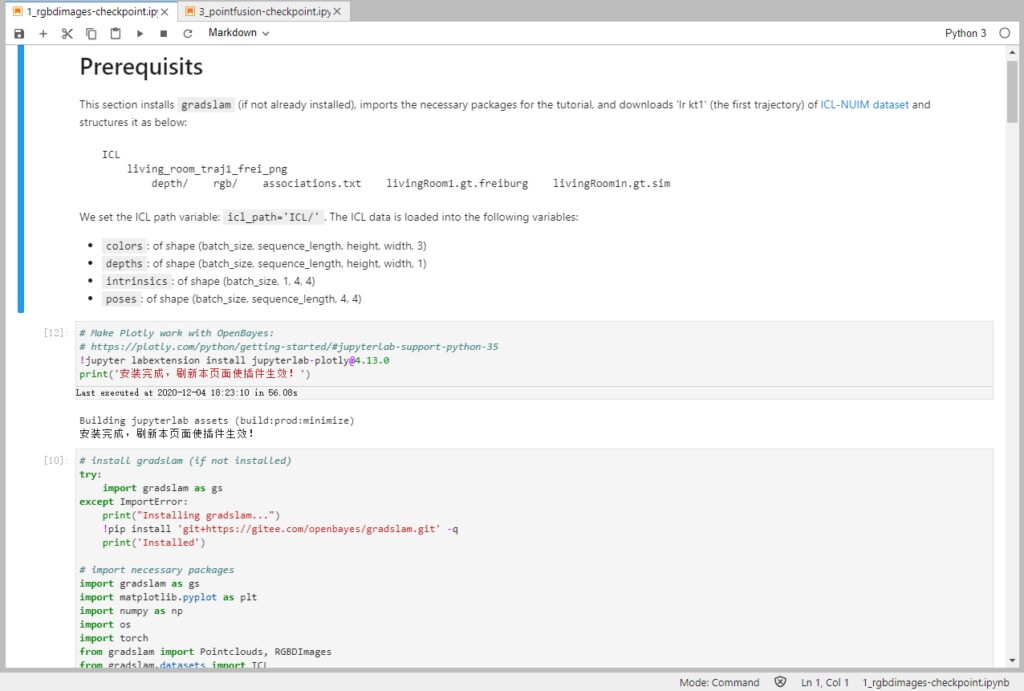
ただ必要なアクセス オープンベイズ.com 登録すると、CPU、NVIDIA T4、NVIDIA Tesla V100 などのさまざまな計算能力リソースを取得できます。現在、内部テスト期間中、無料の計算能力割り当てが毎週アカウントに配布されます。
OpenBayes は、さまざまなコンピューティング パワー コンテナーを提供することに加えて、多くの人気のあるプロジェクト向けにパブリック データ セット、事前トレーニングされたモデル、Jupyter Notebook も提供しており、これらはワンクリックで簡単に実行できます。
登録手順
- openbayes.com にアクセスしてください
- 招待コードあり:HyperAI
新規ユーザー登録して入手
- 空きCPU割り当て:300分/週
- 無料の vGPU クォータ:180分/週
gradslam (∇SLAM) 操作命令
- openbayesへの登録完了後
- コンソールへのアクセス - 公開チュートリアル
SLAM 技術は、ドローンから無人運転、清掃ロボットから VR/AR 分野に至るまで、視覚分野における空間測位技術の最前線として業界で認められています。
したがって、SLAM 方向の最新の科学研究結果も知りたい場合は、今週末 gradslam (∇SLAM) プロジェクトを研究することをお勧めします。
用紙のアドレス:
プロジェクトの GitHub アドレス:
https://github.com/gradslam/gradslam
gradslam (∇SLAM) JupyterNotebook アドレス:
https://openbayes.com/console/openbayes/containers/HoveymNsfrT