Command Palette
Search for a command to run...
死んだ家の所有者に朗報です。レゴが多すぎても心配する必要はありません。スマート仕分け機がレゴの仕分けに役立ちます。
レゴは現在、高品質のおもちゃのほぼ同義語であり、このブランドはレゴ ブロックで最もよく知られています。豊かな形とさまざまな遊び方があり、大人から子供まで幅広く愛されています。しかし、これら複雑かつ多様な部品を分類して保管することも大きな課題です。ソフトウェア エンジニアが AI テクノロジーを使用してレゴ仕分け機を構築したところ、大多数のレゴ愛好家に朗報がもたらされました。
レゴで遊んだことがない人は、レゴについて聞いたことがあるかもしれません。レゴ グループは 1932 年にデンマークで誕生し、その後すぐに、"レゴ"この商標は、高品質のおもちゃの代名詞となっています。

レゴの最も有名なレゴ ビルディング ブロックは 1949 年に発売されて以来、 70年の歴史。
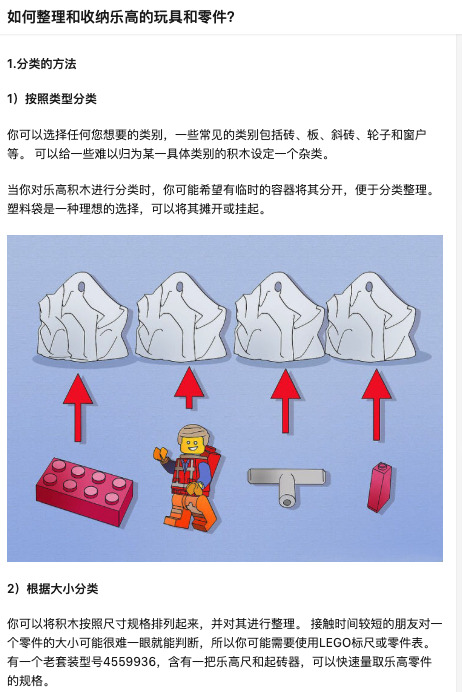
レゴを分類するのがいかに難しいかについて
レゴ ブロックは、その複雑さ、多様性、幅広い想像力によって子供たちにとって非常に魅力的であり、多くのプレイヤーを魅了し、多くの教育機関で教材としても使用されています。しかし、パーツの種類が豊富なため、レゴ好きの友達は分類に迷うこともよくあります。今のところ、レゴブロックは 119シリーズ、111色、各シリーズには以下が含まれます何百、あるいは何千もの部品。
かつて、eBay のオークションで 2 トンのレゴ ブロックを収穫したレゴ愛好家がいました。購入できてとてもうれしかったが、これほど巨大なレゴを前にすると、「すべてを理解するには何年もかかるだろう」と唖然としたと自身のブログに書いている。

多くのプレイヤーは、レゴの分類と構成についても研究しています。コンピューター ビジョンに興味を持つオーストラリアのソフトウェア エンジニア、ダニエル ウェストは、この「ハゲ」問題を AI に引き渡しました。
世界初の万能AIレゴ仕分け機
人間の場合、積み木を見ただけで、1~2歳の子どもでも、例えば2×1の赤い積み木、数個並べると4×1というように、その形や色などを簡単に識別することができます。緑色のブロックと小さなチェーンブロックの違い。
しかし、分類と帰納のタスクが機械に引き渡されたらどうなるでしょうか?それはそれほど単純ではないようです。
早くも 2011年, 日本のレゴ愛好家 アキユキー、この問題を解決するためにレゴ仕分け機を発明しました。ただし、彼のデータベースには画像が少なく、並べ替えの速度も遅くなります。

レゴと機械が大好きなakiyukyさんからインスピレーションを受けましたオーストラリア人のソフトウェアエンジニア、ダニエル・ウェスト よりスマートで高速な仕分けレゴ仕分け機を設計したい。
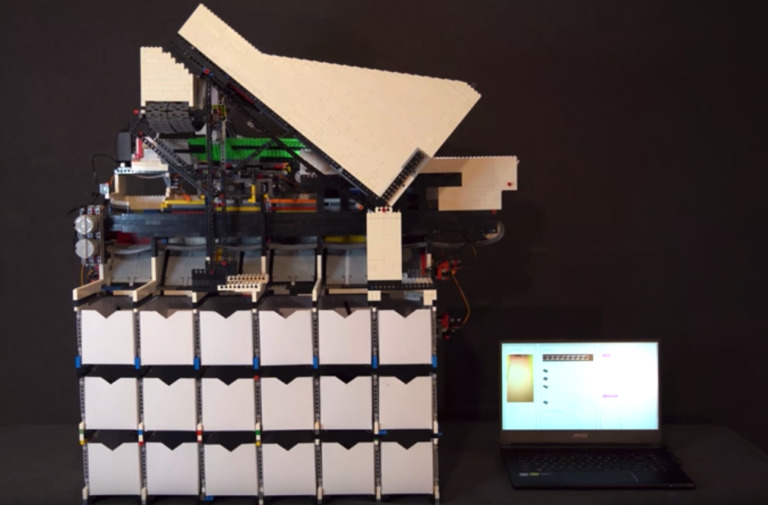
そこで彼は 2 年間を費やして、10,000 個を超えるレゴ ブロック、万能レゴブロック仕分け機を作りました。コンピュータービジョンアルゴリズムの助けを借りて、あらゆるレゴパーツを分類できます。この装置には、レゴ パーツを輸送するコンベア ベルトとミキサーに動力を供給するために、6 台のレゴ モーターと 9 台のサーボ モーターも搭載されています。
ウェストは機械はそれができると言う2927 個のレゴ ブロックを 18 の異なる分類箱に分類します、そして2秒ごと積み木を分割するだけです。この効率はかなり良いですよね?
これは世界初のレゴ仕分け機ではないが、ウェスト氏はこれを世界初のレゴ仕分け機と呼んでいる世界初の万能レゴ仕分け機「最先端の人工知能技術を使用しているため、製造されたあらゆるレゴ部品を識別して分類することができます。」ウェスト氏は将来、コードを公開する予定です。
分類作業、プロセスは3つのステップに分かれています
この有能な機器は具体的にどのように機能するのでしょうか?全体としては複雑ではないようで、手順は全部で 3 つあります。
ステップ 1: ブロックを置きます。
大量のレゴブロックを機械上部のシュートに流し込み、振動ベルトの上に置くことで振動して個々のブロックに分散します。
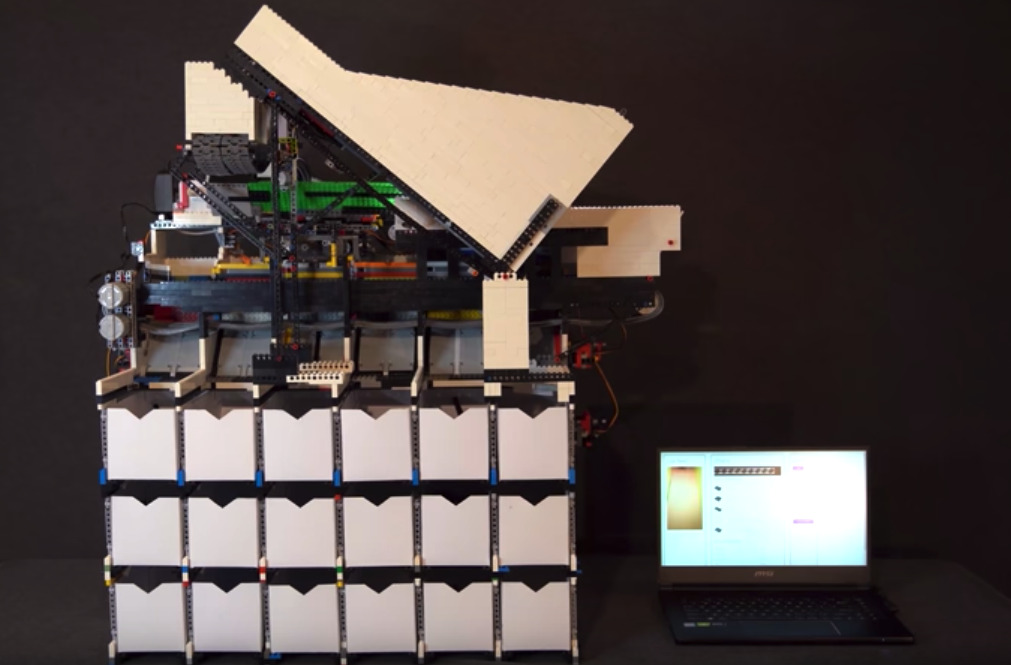
ステップ 2: 写真を撮って分類します。
ビルディング ブロックは Raspberry Pi コンピューターによって提供されます。 Raspberry Pi コンピューターにはカメラが組み込まれており、レンガが通過するときに一連の写真を撮影し、これらの写真を CNN モデルに送信します。 レスネット-50 で分類します。
ステップ 3: ボックスに分類する
分類結果が装置にフィードバックされた後、ベルトコンベア上のさまざまな小さなゲートがブロックをそれぞれの箱に導きます。
テクノロジーが「紆余曲折」を実現
レゴのパーツは数百種類あるため、色も様々で、見る角度によって形も異なります。したがって、適切なトレーニング データセットを収集することは、仕事全体の中で最も難しい部分です。

ウェスト氏は、最初はレゴブロックをシミュレートしようとしたと語った。彼はから LDraw パーツ ライブラリ(愛好家がレゴを仮想的に構築できるオープンソース プログラム) レゴ パーツを入手しました 3Dモデルを作成し、それを無料のアニメーション ソフトウェア Blender でレンダリングします。

その後、さまざまな回転角度と色で 3D モデル ブロックをシミュレートできます。これらの個々の画像は、2,500 万以上の画像合成データセットの。
しかしウェストは残念なことに、彼のAIレゴ仕分け機は偽の画像で訓練されたが、本物の部品を認識できなかった。 「私はこのプロジェクトを完全に諦めかけました。合成画像を実際の画像に変換する複雑な方法を実装するのに何ヶ月も費やしましたが、ほとんど成功しませんでした。」
次に彼は、シミュレーションと現実の間のギャップを減らすために一般的に使用される別の手法に目を向けました。ドメインのランダム化。
ドメインのランダム化により、より多くのデータのバリエーションを認識するようにモデルをトレーニングできます。このシステムは、レゴ ブロックのさまざまな回転角度と色を学習しただけでなく、さまざまな照明効果、テクスチャ、ノイズを考慮することも学習しました。。
Lego 分類器のパフォーマンスをさらに向上させるために、West 氏は実際の Lego パーツのスナップショットを含む小規模なデータセットも組み込みました。 「実際のデータセットには私の個人コレクションのパーツのみが含まれており、最終的には 544 種類のパーツが含まれていました。これらのパーツはレゴ セットでよく見られるタイプであり、合成データセットはあまり一般的ではないものの一部でした」と彼は言いました。 。 タイプ。
これら 2 つのデータセットでトレーニングすることにより、ウェストのレゴ仕分け機のカメラは理論的には実際に見たことのない部品を識別できるはずです。ただし、さまざまなデータセットでのモデルの実際のパフォーマンスは依然として異なります。実際のデータセット部品が入っているときは、 93%、特定しながら合成データセットの部品の精度は次のとおりです。 74%。
トレーニングデータセットを収集するのは簡単ではありません、ウェスト氏も特別記事を書きました (オリジナルリンク: http://985.so/f5G8)では、レゴ ブロックのラベル付きトレーニング画像 100,000 個を作成した方法を詳しく説明しています。記事では、大量の画像にラベルを付けるタスクを完了するために、主にサンプル生成方法、簡素化されたプロセス、AI 支援の注釈を使用したと述べています。
AIの力を借りて夢が叶う
ウェストはレゴが大好きで、彼の夢はレゴに関係していると彼は言いました。彼はついに、実際に動くレゴ仕分け機を作るという長年の夢を達成することになる。、人工知能システムの設計と展開の実世界での経験を積みながら。

興味は最良の教師であり、最大の原動力です。同時に、テクノロジーの発展は興味や夢を促進し、あらゆる規模の夢をより迅速かつ完璧に実現できるようになりました。最近では、AI がレゴの分類に役立ちますが、AI に他にできないことは何でしょうか?
- 以上 -