Command Palette
Search for a command to run...
SurgWorld : Apprentissage de politiques de robots chirurgicaux à partir de vidéos grâce à la modélisation du monde
SurgWorld : Apprentissage de politiques de robots chirurgicaux à partir de vidéos grâce à la modélisation du monde
Résumé
La rareté des données reste une barrière fondamentale à la réalisation de robots chirurgicaux entièrement autonomes. Bien que les modèles vision-langage-action (VLA) à grande échelle aient démontré une généralisation remarquable dans la manipulation domestique et industrielle grâce à l’exploitation de données vidéo accompagnées d’actions provenant de domaines diversifiés, la robotique chirurgicale souffre d’un manque de jeux de données intégrant à la fois des observations visuelles et des cinématiques robotiques précises. En revanche, de vastes corpus de vidéos chirurgicales existent, mais ils sont dépourvus d’étiquettes d’actions correspondantes, ce qui empêche leur utilisation directe dans des approches d’apprentissage par imitation ou d’entraînement des modèles VLA. Dans ce travail, nous cherchons à atténuer ce problème en apprentissage de modèles de politique à partir de SurgWorld, un modèle mondial conçu pour l’intelligence artificielle physique chirurgicale. Nous avons constitué le jeu de données Surgical Action Text Alignment (SATA), doté de descriptions détaillées des actions spécifiquement destinées aux robots chirurgicaux. À partir de ce dernier et du modèle mondial physique le plus avancé, nous avons développé SurgeWorld. Ce modèle est capable de générer des vidéos chirurgicales diversifiées, généralisables et réaliste. Nous sommes également les premiers à utiliser un modèle de dynamique inverse pour inférer des pseudocinématiques à partir de vidéos chirurgicales synthétiques, produisant ainsi des données vidéo-action appariées synthétiques. Nous démontrons qu’une politique VLA chirurgicale entraînée avec ces données augmentées surpasse significativement les modèles entraînés uniquement sur des démonstrations réelles lorsqu’elle est testée sur une plateforme robotique chirurgicale réelle. Notre approche ouvre une voie évolutivement scalable vers l’acquisition autonome de compétences chirurgicales en exploitant l’abondance des vidéos chirurgicales non étiquetées et la modélisation mondiale générative, permettant ainsi le développement de politiques robotiques chirurgicales généralisables et efficaces en termes de données.
One-sentence Summary
The authors, from NVIDIA, The Chinese University of Hong Kong, Sung Kyun Kwan University, Wenzhou Medical University, National University of Singapore, and Ruijin Hospital, propose SurgWorld—a novel framework that leverages a large-scale surgical world model trained on the curated SATA dataset to generate high-fidelity synthetic video-action pairs via inverse dynamics modeling, enabling data-efficient and generalizable training of vision-language-action policies for surgical robots, significantly improving performance over real-data-only baselines in needle manipulation tasks.
Key Contributions
- Data scarcity in surgical robotics, particularly the lack of paired video-kinematic data, hinders the training of generalizable robot policies, despite the abundance of unlabeled surgical videos.
- The authors introduce SurgWorld, a diffusion-based world model trained on the curated SATA dataset, which generates photorealistic, task-consistent surgical videos and enables the first use of inverse dynamics models to infer pseudo-kinematics from synthetic video rollouts.
- Evaluations on a real surgical robot show that a VLA policy trained with both real and synthetic data from SurgWorld achieves significantly lower trajectory prediction error and superior performance compared to models trained only on real demonstrations.
Introduction
The authors address the critical challenge of data scarcity in autonomous surgical robotics, where high-fidelity paired video-kinematic data is extremely limited due to ethical, logistical, and safety constraints. While vision-language-action (VLA) models have enabled generalizable manipulation in household and industrial settings, their application in surgery is hindered by the lack of large-scale, annotated datasets that link visual observations with precise robot actions. Prior efforts to generate synthetic data through physics-based simulators suffer from significant visual and dynamic domain gaps, while existing surgical video generation models are often task-specific and lack robust text-action alignment. To overcome these limitations, the authors introduce SurgWorld, a surgical world model built on a curated, expert-annotated dataset called SATA, which contains 2,447 video clips with detailed action descriptions across 8 procedures. They leverage this model to generate photorealistic, task-consistent surgical videos and, for the first time, use an inverse dynamics model to infer pseudo-kinematics from synthetic video rollouts, creating augmented paired video-action data. This synthetic data enables training of a surgical VLA policy that significantly outperforms models trained only on real demonstrations, demonstrating a scalable, data-efficient path toward autonomous surgical skill acquisition by bridging the gap between abundant unlabeled surgical videos and robot control.
Dataset
- The SATA dataset consists of 2,447 expert-annotated video clips totaling over 300,000 frames, spanning 8 surgery types and four fundamental surgical actions: needle grasping (689 clips), needle puncture (989 clips), suture pulling (475 clips), and knotting (294 clips).
- Data is sourced from credentialed YouTube surgical channels and public datasets including GraSP, SAR-RARP50, Multiypass140, SurgicalActions160, Auto-Laparo, and HeiCo, with annotations re-processed to ensure consistency and granularity.
- Each clip is paired with a detailed textual description capturing spatial relationships between instruments, anatomical structures, and instrument-tissue interactions—e.g., "The left needle driver punctures the right side of the patient's dorsal venous complex."
- The dataset is designed for physical AI, emphasizing fine-grained action labels and precise descriptions of tool-tissue dynamics, distinguishing it from semantic-focused datasets like SurgVLM-DB.
- For model training, SATA is used as a primary source for aligning video and text, with a mixture ratio that balances the four action categories to ensure representative coverage during training.
- The authors apply a cropping strategy to focus on the region of interest around the surgical site, ensuring consistent visual context across clips.
- Metadata is constructed to include action labels, anatomical context, instrument types, and interaction types, enabling structured learning of surgical procedures.
- Real-world trajectory data includes 60 successful human-teleoperated demonstrations of the "Needle Pickup and Hand-Over" task on a rubber pad, with synchronized endoscopic video (avg. 217 frames) and 20-dimensional action kinematics.
- Action kinematics are represented as a 20D vector encoding position, orientation (6D rotation), and gripper state for both left and right robotic arms, all relative to the endoscope frame for view consistency.
- An additional 66 out-of-domain episodes (approx. 60k frames) of general robot movements are used to pretrain a foundational inverse dynamics model (IDM), enabling transferable motion understanding across tasks.
- The IDM and the vision-language action model (GR00T N1.5) share a similar architecture, but the IDM operates without text prompts or robot state inputs, focusing solely on motion prediction from visual input.
Method
The authors leverage the Cosmos-Predict2.5 model, a large-scale video world model pretrained on diverse robotic and embodied datasets, as the foundation for their surgical world model, SurgWorld. This model employs a diffusion-based latent video prediction framework with a transformer backbone to simulate high-fidelity spatiotemporal dynamics. To adapt it to the surgical domain, the model is fine-tuned on the SATA dataset, which includes real-world surgical trajectories and detailed annotations. The adaptation process conditions the model solely on the initial observed frame I0 and a text prompt, enabling it to predict future trajectories that capture the temporal evolution of the surgical scene. This includes modeling instrument-tissue interactions, limited field-of-view motion, and constrained articulation patterns unique to endoscopic surgery. To ensure parameter efficiency and preserve the model's general video modeling capabilities, Low-Rank Adaptation (LoRA) is applied by inserting modules into the transformer's attention and feed-forward layers. The resulting model, denoted as Wθ, generates video rollouts I^1:T=Wθ(I0), where a spatiotemporal encoder processes the initial frame, a transformer-based latent dynamics module models temporal evolution, and a decoder reconstructs the predicted frames.

The training of the surgical video world model is conducted using the Flow Matching (FM) formulation, which provides a direct and stable training signal in latent space. The method defines a velocity-based target by interpolating between the original data sample I and a noise vector ϵ at a timestep t, resulting in the interpolated latent It=(1−t)I+tϵ. The corresponding ground-truth velocity is vt=ϵ−I. The model predicts this velocity via a network uθ(It,t,c), where c represents the conditioning frame I0 and the text prompt. The training objective is the mean squared error (MSE) between the predicted and ground-truth velocities, formulated as L(θ)=EI,ϵ,c,t∥uθ(It,t,c)−vt∥Q2. This approach enhances optimization stability and sample quality.

To bridge the gap between the world model and the specific robot embodiment, an inverse dynamic model (IDM) is constructed. The IDM takes two frames from the same video, separated by 16 frames, as input and predicts the robot actions for every frame between them. This model is trained to label the synthetic video rollouts generated by the world model with pseudo action kinematics. The IDM architecture, as shown in the figure below, consists of a diffusion transformer with a SigLIP-2 vision encoder, an action encoder, and an action decoder. The model processes the two input frames and the corresponding noisy actions to predict the intermediate actions.

The final policy for the robot is learned using the GR00T Vision Language Action Model, which is also based on a diffusion transformer. This model takes the current frame, a text prompt, and the robot state as inputs to predict future actions. The architecture includes a vision language model, a state encoder, and an action encoder, all feeding into the diffusion transformer to generate the predicted actions. The IDM and the GR00T policy model share a similar backbone but differ in their inputs and outputs, with the IDM focusing on action prediction from video frames and the GR00T model incorporating robot state for policy learning. The synthetic videos and pseudo kinematics generated by the world model and IDM are used to train the GR00T policy, enabling it to learn from both real and synthetic data.
Experiment
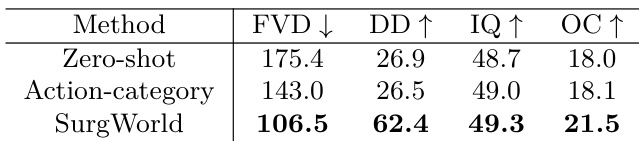
- Evaluated SurgWorld on video generation quality using the curated SATA dataset, demonstrating superior perceptual fidelity and semantic coherence over zero-shot and coarse-prompt baselines, achieving the lowest FVD and highest VBench scores (DD, IQ, OC), with qualitative results showing correct tool and action generation even in challenging scenarios.
- Validated new behavior generalization by generating diverse surgical sequences (e.g., multi-time needle handover) from novel textual prompts, showing strong text–video alignment and anatomically plausible, temporally consistent motions despite no explicit training on such compositions.
- Human expert evaluation confirmed SurgWorld’s clinical realism, achieving the highest ratings across text-video alignment, tool consistency, and anatomical plausibility, outperforming zero-shot and action-category variants in surgical fidelity.
- Demonstrated effective few-shot adaptation on 5 real surgical trajectories, where SurgWorld pretrained on SATA achieved a 73.2% task success rate and lowest FVD, significantly outperforming direct finetuning from the original model, highlighting improved data efficiency and robustness.
- Showed that synthetic data from SurgWorld enhances downstream robotic policy learning: using 56 or 560 synthetic videos reduced trajectory MSE across cartesian, rotation, and jaw actions compared to real-only training, with consistent improvements across varying real data sizes and policy models (GR00T, π₀.₅).
- Confirmed that single-view synthetic videos from SurgWorld improve multi-view policy performance even when real data includes multiple camera views, and that benefits persist across different training hyperparameters and VLA architectures.
The authors evaluate three variants of the Surgical World Model on the SATA dataset, comparing Zero-Shot, Finetuned-Orig, and SurgWorld. Results show that SurgWorld achieves the highest task success rate, lowest FVD, and best scores across all VBench metrics, indicating superior video quality and task performance.

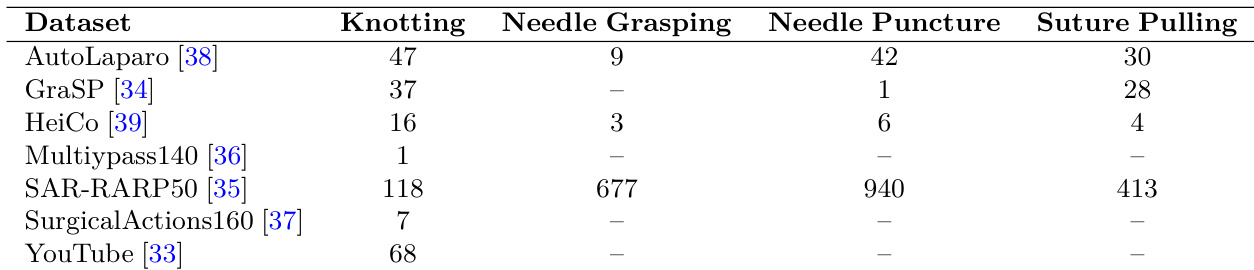
The authors use the table to show the distribution of video clips across different surgical actions in the SATA dataset, highlighting that the dataset is heavily skewed toward certain procedures like Needle Grasping and Suture Pulling. This imbalance reflects the focus on specific surgical tasks in the data collection process, with some actions such as Knotting and Needle Puncture being less represented.
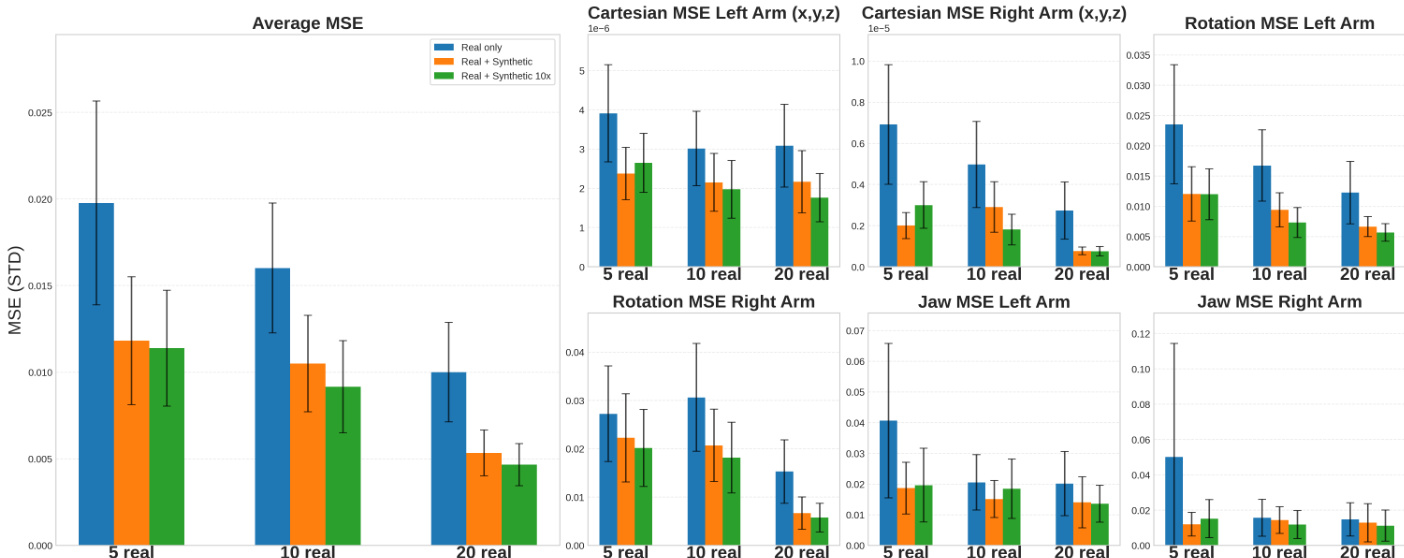
The authors evaluate the impact of synthetic data on robotic policy performance by comparing trajectory prediction errors across different training configurations. Results show that incorporating synthetic videos significantly reduces mean squared error (MSE) across all action components—cartesian, rotation, and jaw—compared to training with real data alone, with the largest improvements observed when using 10× more synthetic data. This demonstrates that synthetic data enhances policy learning, particularly with limited real-world demonstrations.
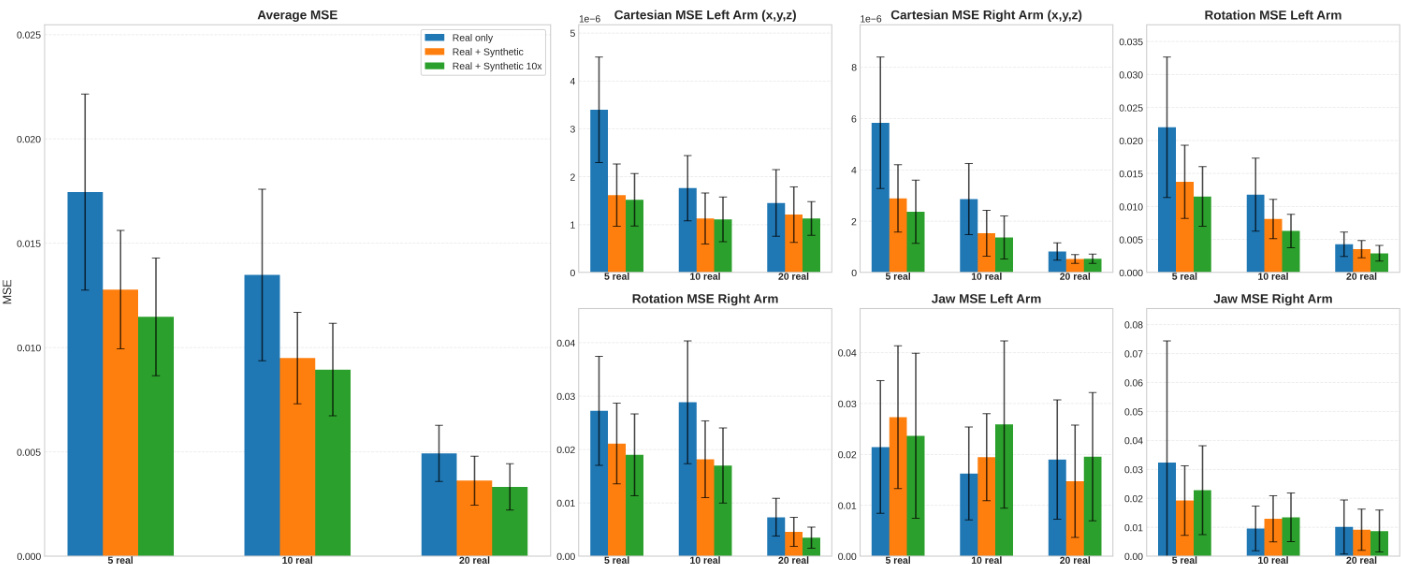
The authors evaluate the impact of synthetic data on robotic policy performance by comparing trajectory prediction errors across different training configurations. Results show that incorporating synthetic videos significantly reduces the mean squared error (MSE) for both Cartesian and rotational actions, with the best performance achieved when using 560 synthetic videos (Real + Synthetic 10x), particularly with 5 real trajectories. This improvement holds across varying numbers of real training data and different finetuning steps, demonstrating that synthetic data enhances policy learning even with limited real-world examples.
Results show that the SurgWorld model achieves the best performance across all metrics, with the lowest FVD and highest scores in dynamic degree, imaging quality, and overall consistency compared to the zero-shot and action-category baselines. This indicates that fine-grained, expert-curated textual prompts significantly improve perceptual realism and semantic coherence in surgical video generation.