Command Palette
Search for a command to run...
ROCKET-2 : Transfert Zero-Shot Du Jeu 3D
1. Introduction au tutoriel

ROCKET-2 est un système de contrôle de mouvement visuel pour l'alignement de cibles multi-vues, lancé par l'équipe CraftJarvis le 21 mars 2025. Il vise à résoudre des problèmes complexes de contrôle de tâches en robotique. Grâce à une technologie innovante d'alignement de cibles multi-vues, ce projet améliore considérablement la capacité de généralisation et la contrôlabilité des politiques de mouvement visuel dans des environnements dynamiques. Des articles de recherche associés sont disponibles. ROCKET-2 : Pilotage de la politique visuomotrice via l'alignement des objectifs croisés .
Ce tutoriel utilise une seule carte RTX 5090 comme ressource.
2. Exemples de projets

3. Étapes de l'opération
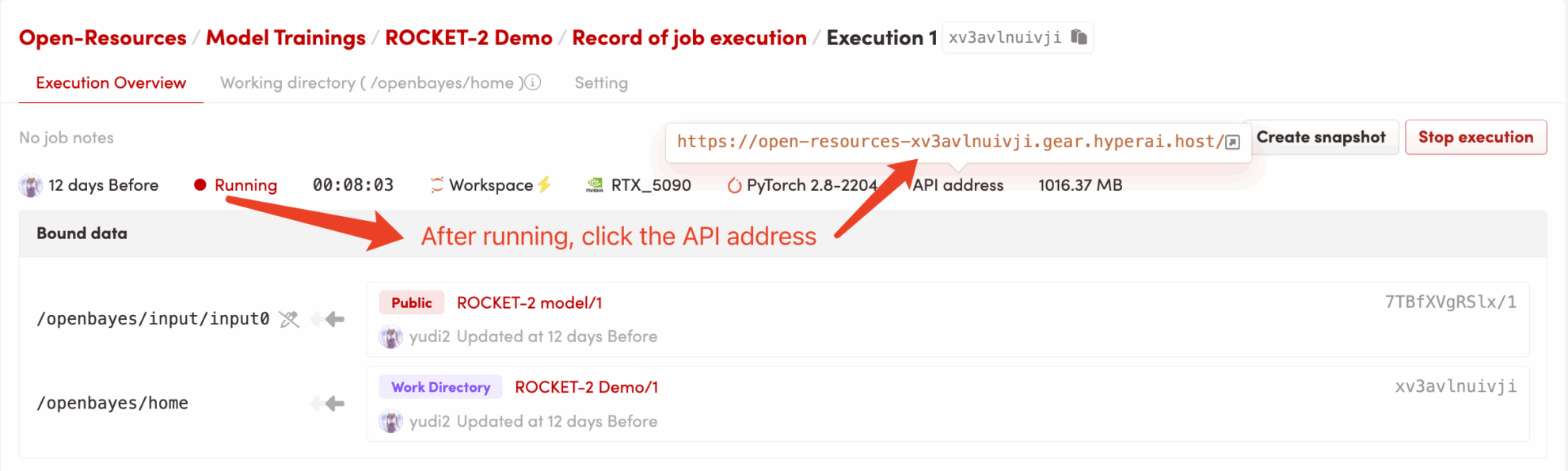
1. Après avoir démarré le conteneur, cliquez sur l'adresse API pour accéder à l'interface Web
Si « Bad Gateway » s'affiche, cela signifie que le modèle est en cours d'initialisation. Étant donné que le modèle est grand, veuillez patienter environ 1 à 2 minutes et actualiser la page.
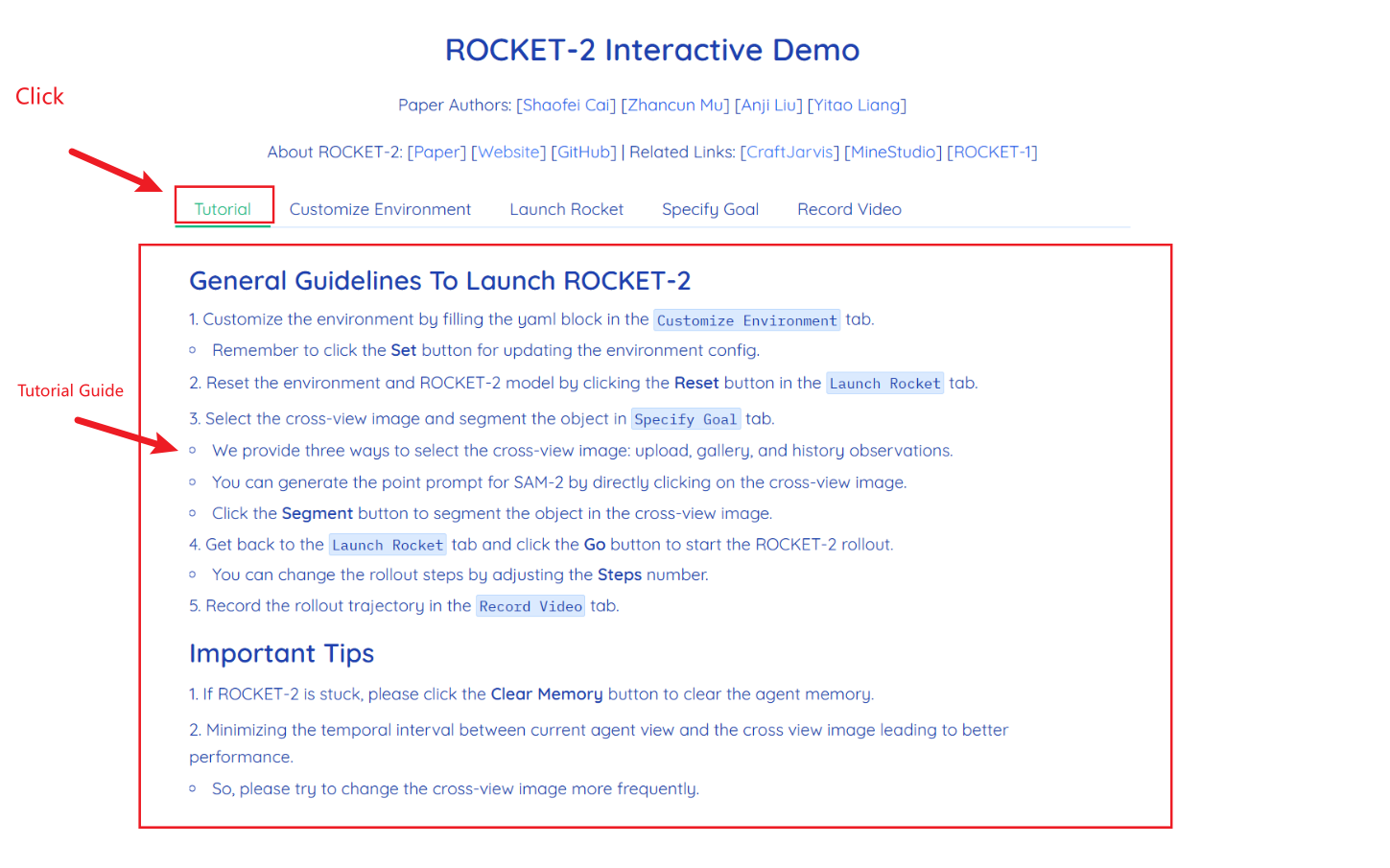
2. Après être entré sur la page Web, vous pouvez démarrer une conversation avec le modèle
Comment utiliser
- Accédez au didacticiel pour afficher le guide du didacticiel
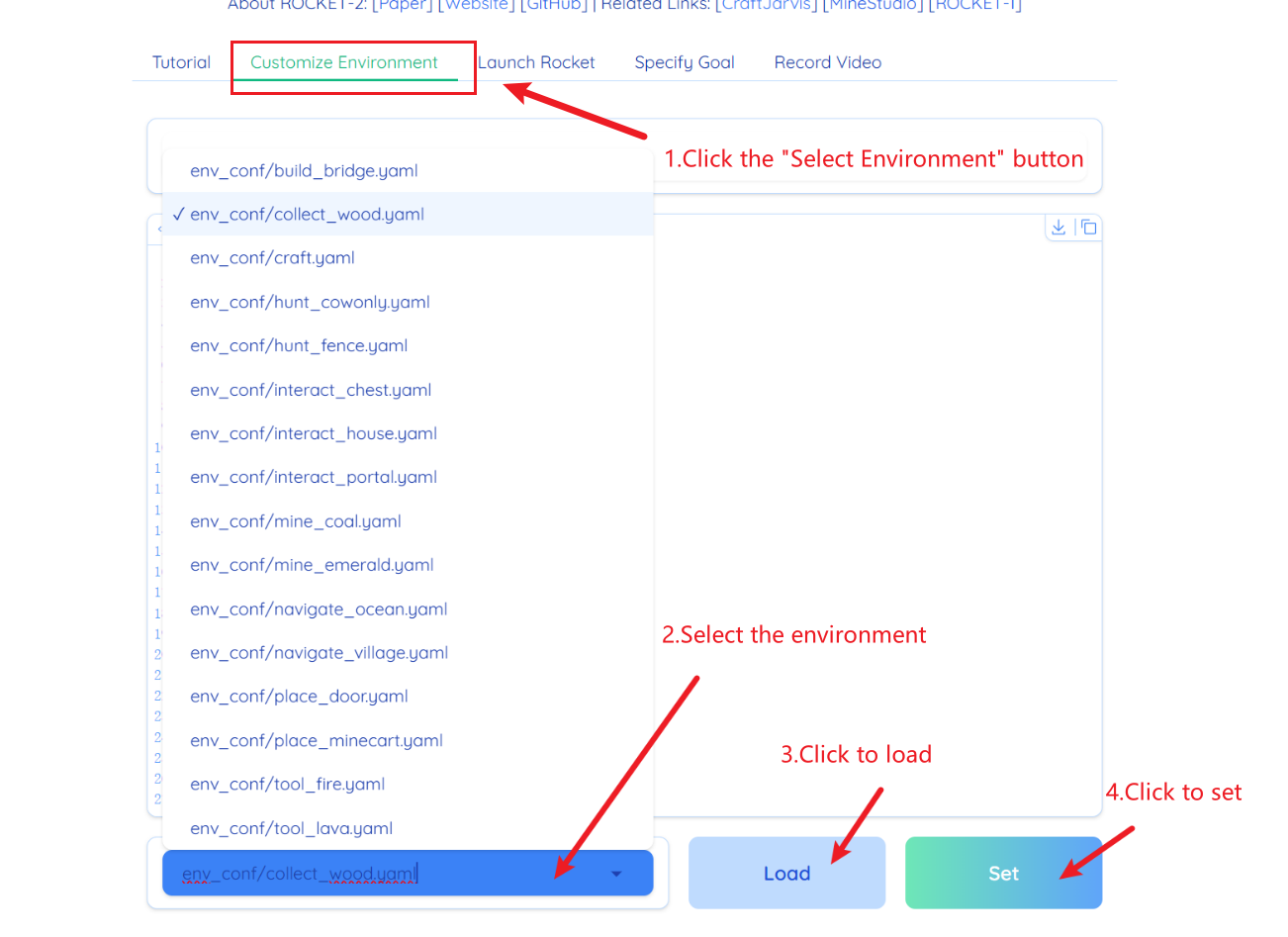
- Entrez dans Personnaliser l'environnement et sélectionnez l'environnement que vous souhaitez charger
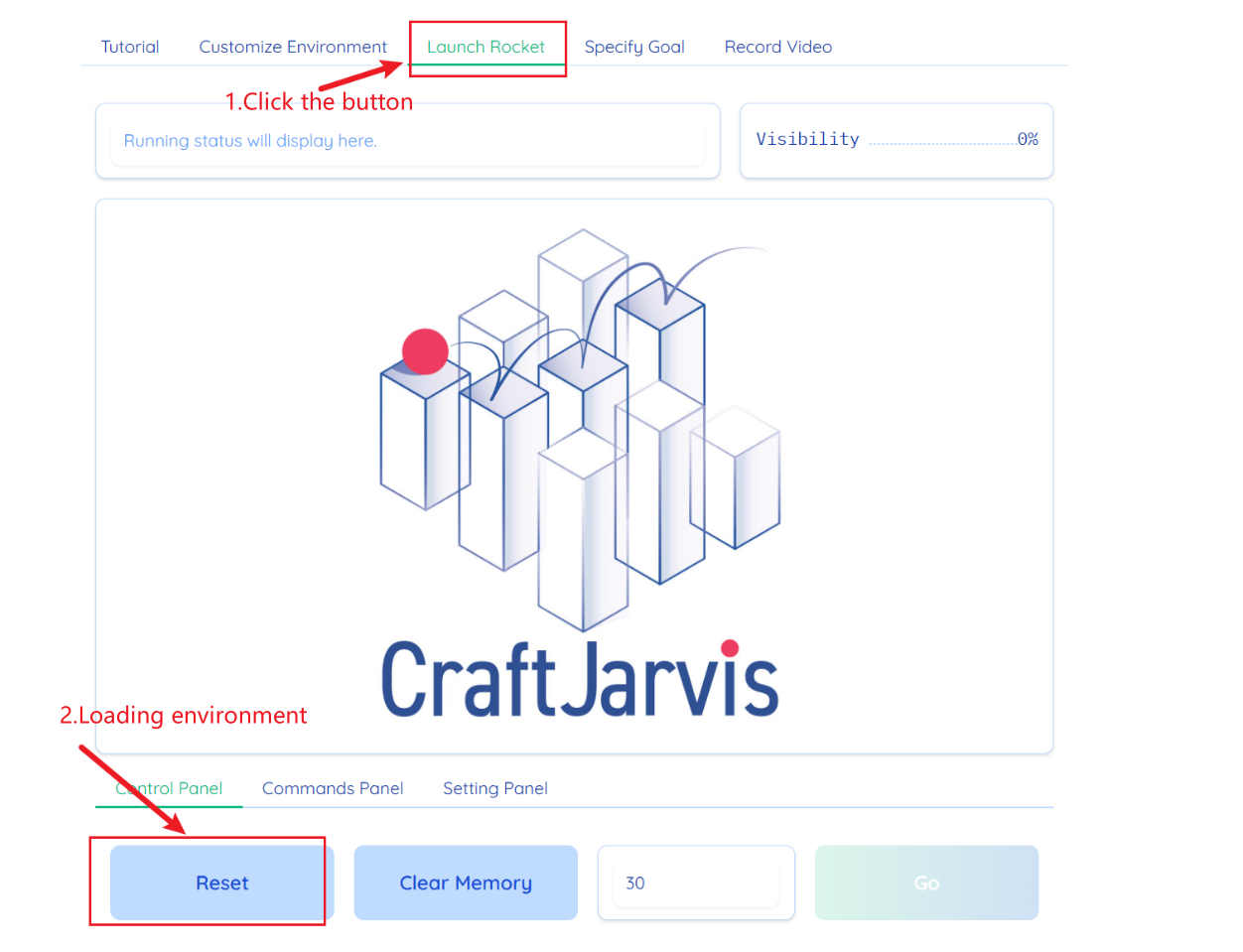
- Entrez dans l'environnement de chargement de la fusée de lancement
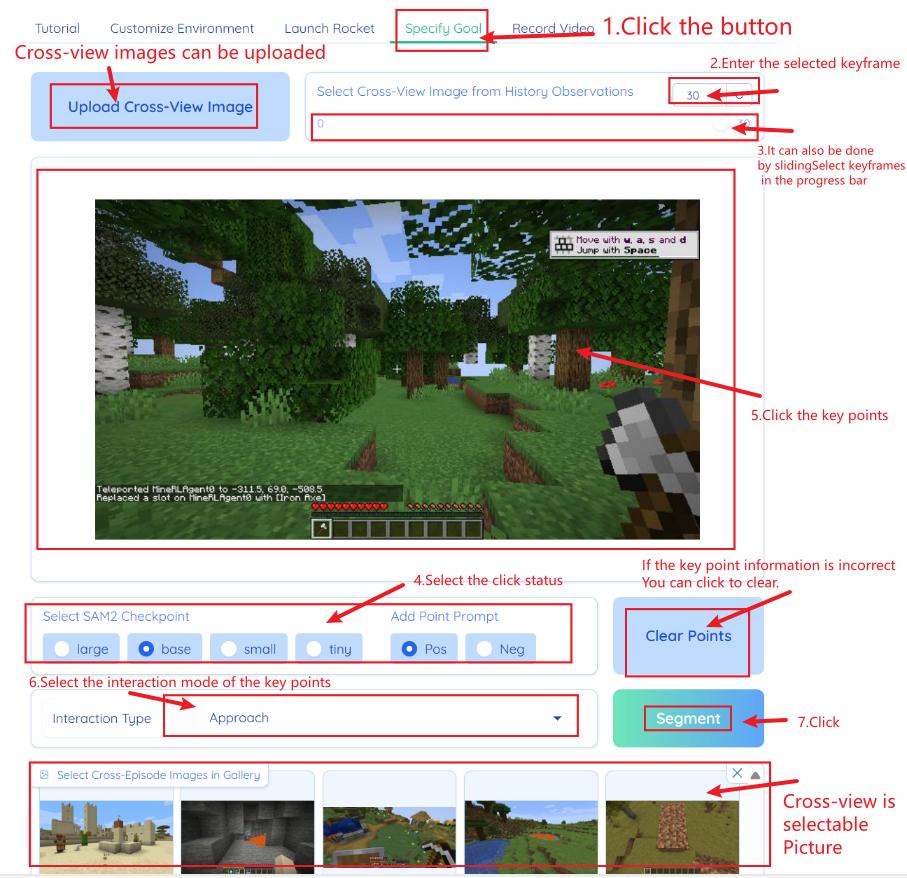
- Entrez Spécifier l'objectif et sélectionnez le point cible et la méthode d'interaction
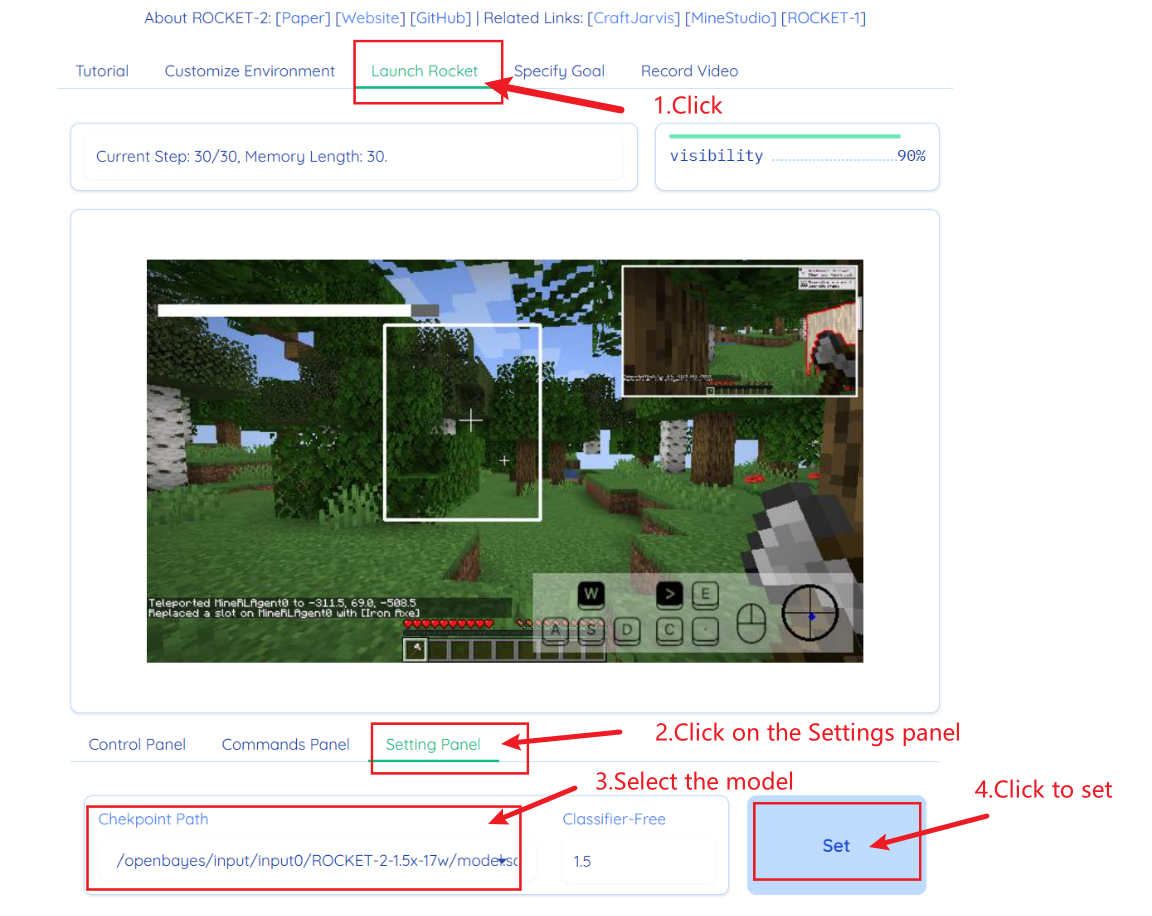
- Accédez au panneau de configuration de Launch Rocket et sélectionnez le modèle
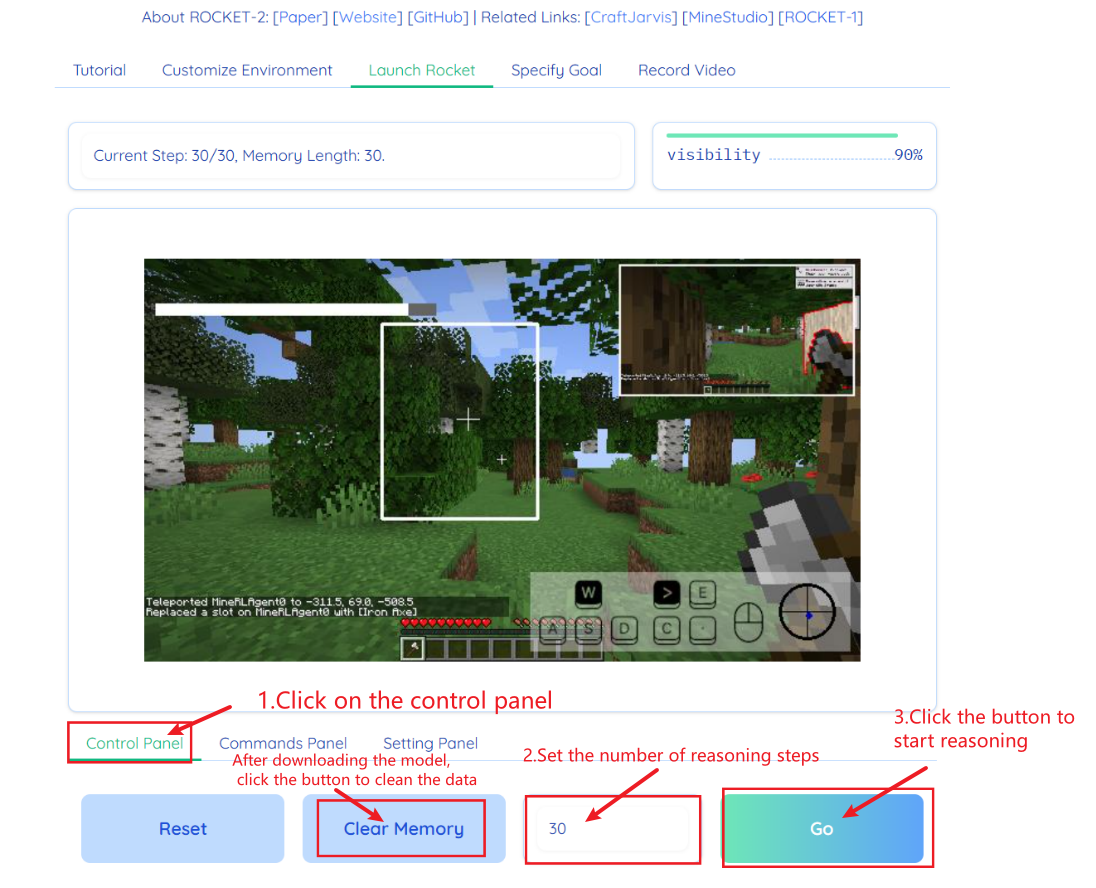
- Accédez au panneau de configuration de Launch Rocket pour définir les étapes d'inférence et effectuer l'inférence
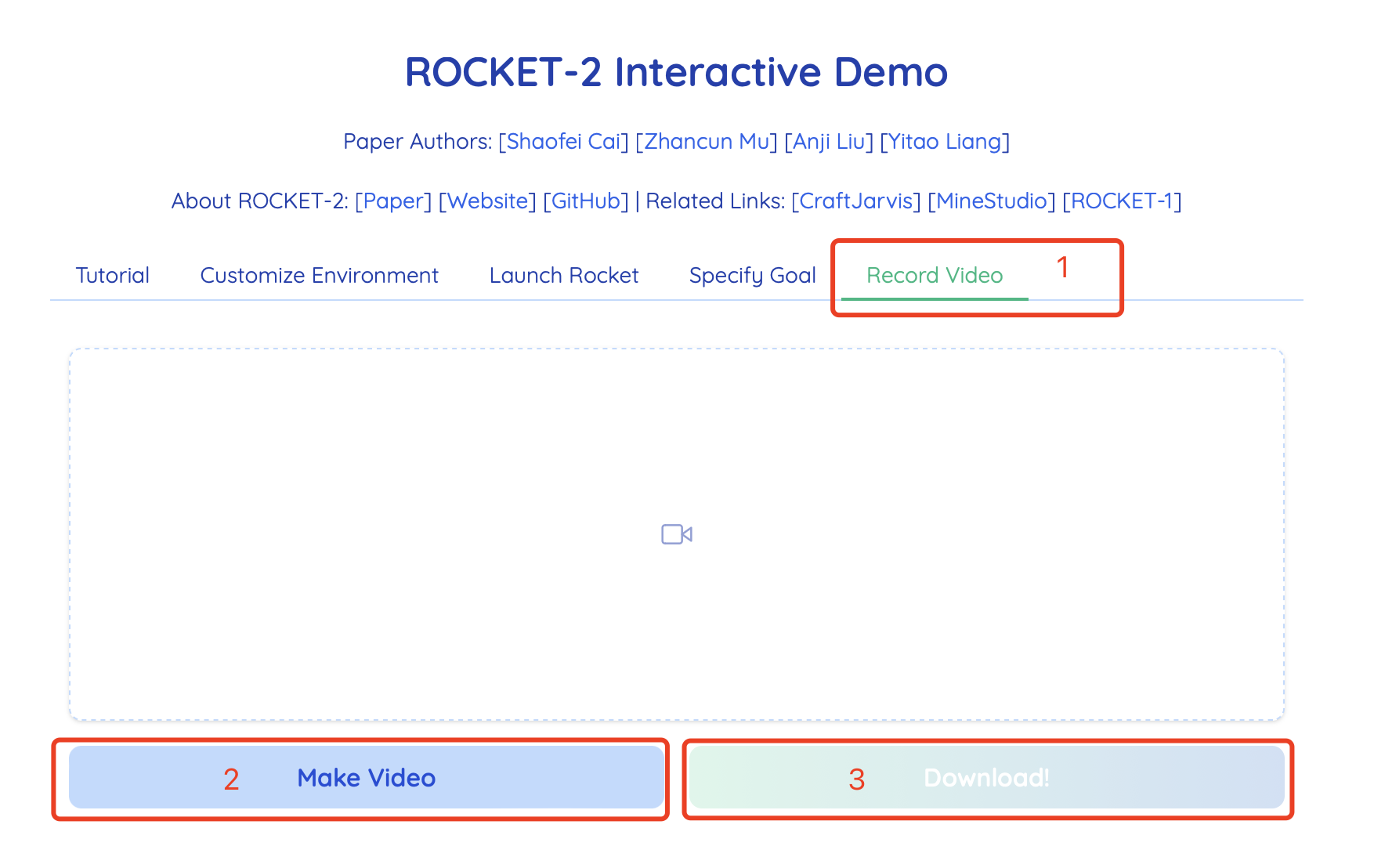
- Répétez les étapes 4 à 6 jusqu’à ce que le processus d’inférence soit terminé. Ensuite, entrez dans le mode Enregistrer la vidéo pour créer et télécharger la vidéo. Cette vidéo n'est pas disponible en ligne.
Informations sur la citation
Les informations de citation pour ce projet sont les suivantes :
@article{cai2025rocket,
title={ROCKET-2: Steering Visuomotor Policy via Cross-View Goal Alignment},
author={Cai, Shaofei and Mu, Zhancun and Liu, Anji and Liang, Yitao},
journal={arXiv preprint arXiv:2503.02505},
year={2025}
}
Vue d’ensemble de Notebook
Niveau
Créer de l'IA avec l'IA
De l'idée au lancement — accélérez votre développement IA avec le co-codage IA gratuit, un environnement prêt à l'emploi et le meilleur prix pour les GPU.