Command Palette
Search for a command to run...
Die Zhejiang-Universität Nutzt SVM Zur Optimierung Taktiler Sensoren Und Die Braille-Erkennungsrate Erreicht 96.12%

Biosensorik ist ein wichtiges Medium für die Interaktion zwischen Mensch und Maschine, Mensch und Umwelt sowie Maschine und Umwelt. Unter anderem kann durch Berührung eine genaue Wahrnehmung der Umgebung erreicht werden und Benutzern die Interaktion mit komplexen Umgebungen erleichtert werden.
Um den menschlichen Tastsinn nachzuahmen, haben Forscher verschiedene Sensoren entwickelt, die die Wahrnehmung der Umgebung durch die Haut simulieren. Allerdings sind an die taktile Sensorik hohe Anforderungen zu stellen und es gibt vielfältige Parametervariationen, die viel Erfahrung in Forschung und Entwicklung, ausreichende Literaturrecherche und eine große Zahl von Versuch-und-Irrtum-Experimenten erfordern, und der Forschungs- und Entwicklungszyklus ist sehr lang.
Zu diesem Zweck verwendeten Forscher der Zhejiang-Universität Support Vector Machines, um die Parameter triboelektrischer taktiler Nanogenerator-Sensoren zu optimieren. Der optimierte Tastsensor kann mehrere Berührungsmuster erkennen und eine Braille-Erkennung realisieren. Diese Errungenschaft soll neue Lösungen für die Entwicklung taktiler Sensoren liefern.
Autor | Xuecai
Herausgeber | Sanyang
Um das menschliche Sinnessystem nachzuahmen, haben Forscher eine Reihe hautähnlicher Sensoren entwickelt, die Informationen wie Berührung, Druck, Vibration, Temperatur und Feuchtigkeit überwachen. In,Taktile Sensoren sind der wichtigste Teil der Interaktion mit komplexen Umgebungen, wird häufig in der Gesundheitsüberwachung, bei intelligenten Robotern, der Mensch-Computer-Umgebungsinteraktion und der virtuellen/erweiterten Realität eingesetzt.
Der ideale Sensor sollte über eine hohe Empfindlichkeit, einen großen Betriebsbereich und eine ausgezeichnete Wiederholgenauigkeit verfügen. Dies erfordert häufig die Auswahl der Sensorparameter auf Grundlage von F&E-Erfahrungen oder Literaturrecherchen, die Durchführung mehrerer Versuchs- und Irrtumsexperimente und schließlich die Verwendung des optimierten Sensors zur Ausführung bestimmter Aufgaben.
Diese Feedforward-Designstrategie isoliert jedoch das Design und die Anwendung von Sensoren, erhöht die Datenlast, schwächt die Signaleigenschaften und verringert die Effizienz der rechnerischen Analyse.
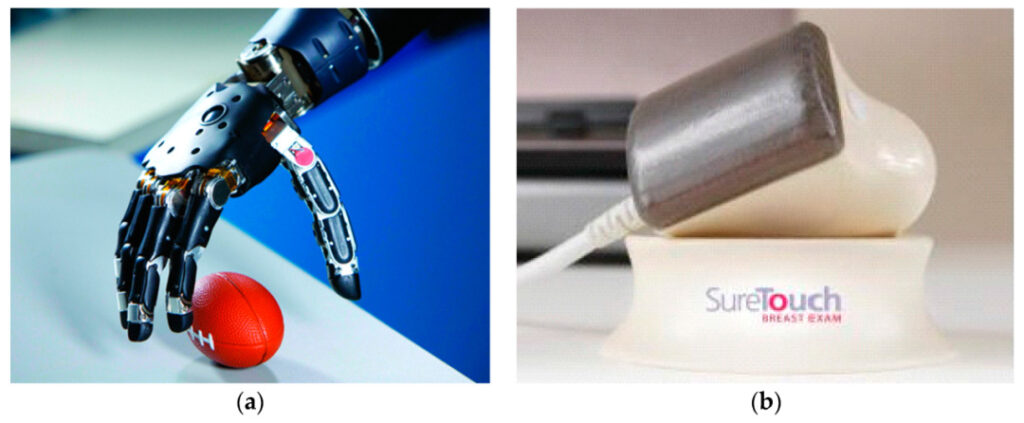
Abbildung 1: Modulare Prothese basierend auf taktilen Sensoren (a) und Brustuntersuchungssensoren (b)
Um die Stabilität der Sensorsignalerkennung zu verbessern,Algorithmen des maschinellen Lernens werden häufig verwendet, um Korrelationen und subtile Unterschiede zwischen Signalen aus verschiedenen Kanälen zu analysieren. Kürzlich ging das Forschungsteam von Yang Geng und Xu Kaichen an der Zhejiang-Universität noch einen Schritt weiter.Das Design des taktilen Sensors mit triboelektrischem Nanogenerator (TENG) wurde mithilfe einer Support Vector Machine (SVM) optimiert. Der optimierte Sensor kann 6 dynamische Berührungsmuster genau identifizieren und darauf basierend eine Texterkennung und Braille-Erkennung durchführen.. Die entsprechenden Ergebnisse wurden in „Advanced Science“ veröffentlicht.

Ähnliche Ergebnisse wurden in „Advanced Science“ veröffentlicht.
Link zum Artikel:
https://onlinelibrary.wiley.com/doi/10.1002/advs.202303949
Experimentelle Verfahren
Überblick:Optimierungsparameter und Optimierungsalgorithmen
Die Leistungsfähigkeit TENG-basierter taktiler Sensoren hängt hauptsächlich von den folgenden Parametern ab:Hierzu zählen der Ausgangssignaltyp, die Elektrodendichte sowie die Form und Verteilung der Oberflächenmikrostruktur. Dies sind die Parameter, die der SVM-Algorithmus optimieren soll.
Der Sensor am Finger kann sechs Berührungsmuster erkennen, darunter Drücken, Tippen, Hoch, Runter, Links und Rechts. Die Erkennung dieser sechs Berührungsmuster ist das Testziel des Sensors und dient der Optimierung der Designparameter.
Der SVM-Algorithmus wird verwendet, um die Qualität des Ausgangssignals zu bewerten und die optimalen Designparameter auszuwählen. Anders als der traditionelle, erfahrungsbasierte Designprozess bietet der SVM-Designprozess eine datenbasierte Parameteroptimierungsmethode, die Gerätedesign und Algorithmen eng miteinander verknüpft.

Abbildung 2: Optimierungsprozess für taktile Sensoren basierend auf maschinellem Lernen
Modelle für maschinelles Lernen:SVM + CNN
In dieser Studie wurde der SVM-Klassifikator mithilfe der Scikit-Learn-Bibliothek in Python erstellt. Insgesamt gibt es 10 Klassifikatoren und der Regularisierungsparameter reicht von 0,1 bis 1,0.
Inzwischen wurde auf Basis des PyTorch-Frameworks ein eindimensionales Convolutional Neural Network (CNN) in Python für das Lernen und Erkennen von Merkmalen im Verifizierungsprozess entwickelt. Das CNN besteht aus fünf Faltungsschichten, gefolgt von einer Batch-Normalisierungsfunktion und einer gleichgerichteten linearen Einheit (ReLU). Das Modell wird mit dem Algorithmus „Adaptive Moment Estimation“ (Adam) mit einer Lernrate von 0,001 und einer Batchgröße von 128 trainiert.

Abbildung 3: CNN-Modelldiagramm
Produktionsprozess:Laserdirektschreiben + PDMS-Verkapselung
Die Herstellung des TENG-Tastsensors umfasst im Wesentlichen 6 Schritte:
1. Herstellung interdigitaler Elektroden durch Infrarot-Laser-Direktschreibtechnologie. Der thermische Effekt des Lasers kann die Karbonisierung eines Polyimidfilms (PI) herbeiführen, um ein laserinduziertes Graphenmuster (LIG) zu erhalten.
2. Auftragen von Polydimethylsiloxan (PDMS) durch Schleuderbeschichtung auf den LIG/PI-Film;
3. Nachdem die PDMS-Lösung in die poröse Struktur von LIG eingedrungen ist, wird der PI-Film abgezogen, um den LIG/PDMS-Film zu erhalten;
4. Behandeln Sie den Film mit Sauerstoffplasma, um elektronegative Gruppen einzuführen und Verunreinigungen auf der Filmoberfläche zu entfernen.
5. Einführung eines Perfluorethylen-Propylen-Copolymers (FEP)-Films zur Verstärkung des triboelektrischen Effekts des Geräts;
6. Zum Schluss mit PDMS einkapseln und die Strukturierung mit dem Laser durchführen.

Abbildung 4: Produktionsprozess des TENG-Tastsensors
Ausgangssignaltyp:Strom und Spannung
Der Ausgangssignaltyp korreliert stark mit der Erkennungsleistung von TENG, daher verglichen die Forscher zunächst die Auswirkungen von Reibungsspannung und Reibungsstrom auf die Sensorleistung.
Erstens die Datenwiederholbarkeit dieser beiden Ausgangssignaltypen. Die Verteilung des Stromsignals ist unregelmäßig und weist eine große Abweichung von den Durchschnittsdaten auf, während die Spannungsdaten nur eine geringe Abweichung von den Durchschnittsdaten aufweisen und besser wiederholbar sind.
Darüber hinaus verwendeten die Forscher einen linearen SVM-Klassifikator zur Klassifizierung der Daten mit einer Klassifizierungsgenauigkeit von 94,278% für Spannungssignale und 95,579% für Stromsignale.Die Trennbarkeit und Diskretheit der Spannungs- und Stromsignale betragen [3.636, 11.877] bzw. [3.528, 11.267].
Um den Einfluss von Daten unterschiedlicher Dimensionen auszuschließen, werden die oben genannten Indikatoren normalisiert, das Ergebnis des Spannungssignals ändert sich von [94,278%, 3.636, 11,877] auf [0, 1, 1] und das Ergebnis des Stromsignals ändert sich von [95,579%, 3.528, 11,267] auf [1, 0, 0]. Dies zeigt, dass es zwei Bewertungskriterien für Spannungssignale gibt, welches für die Signalausgabe besser geeignet ist.

Abbildung 5: Ausgangsspannungs- und Ausgangsstromreaktion auf 6 Berührungsmuster
a&b: Spannungs- und Stromsignalreaktionen auf jeweils 6 Berührungsmodi;
c&d: Ergebnisse der Dimensionsreduzierung der Ausgangsspannungs- bzw. -stromsignale.
Elektrodendichte:Spärlich und dicht
Die Elektrodendichte beeinflusst die Signalkomplexität. Die Forscher untersuchten die Geräteleistung, wenn die Elektroden spärlich und dicht verteilt waren. Nach der Reduzierung der Signaldimensionalität ist ersichtlich, dass spärlich verteilte Elektrodensignale eine größere Unterscheidungsfähigkeit aufweisen.
Die Klassifizierungsgenauigkeit, Trennbarkeit und Diskretheit der spärlich angeordneten Elektrodensignale betragen [96,975%, 3,695, 14,759] und die der dicht angeordneten Elektroden betragen [95,958%, 3,528, 11,542]. Nach der Normalisierung lauten sie [1, 1, 1] bzw. [0, 0, 0], was darauf hinweist, dass es drei Bewertungskriterien für spärlich angeordnete Elektrodensignale gibt.
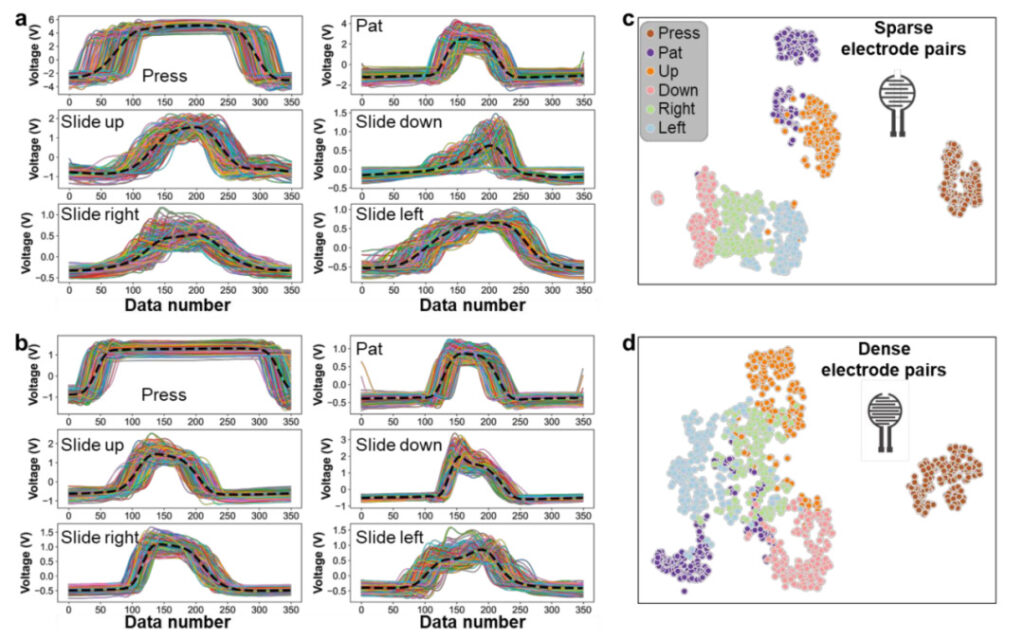
Abbildung 6: Signalreaktionen von dünn und dicht verteilten Elektroden auf sechs Berührungsmuster
a&b: Signalreaktionen von spärlich verteilten Elektroden und dicht verteilten Elektroden auf jeweils 6 Berührungsmodi;
c&d: Ergebnisse der Dimensionsreduzierung von Signalen, die von spärlich bzw. dicht verteilten Elektroden aufgezeichnet wurden.
Mikrostrukturform:Fingerabdruck und Raster
Die raue Mikrostruktur der PDMS-Oberfläche kann den Einfluss der Viskosität auf das Signal reduzieren und das Signal-Rausch-Verhältnis verbessern.. Die Forscher verglichen die Auswirkungen fingerabdruckähnlicher und gitterähnlicher Mikrostrukturen auf die Geräteleistung und stellten fest, dass die Daten der fingerabdruckähnlichen Struktur konzentrierter waren, während das Signal der gitterähnlichen Struktur instabil war.
Die Genauigkeit, Trennbarkeit und Diskretheit der fingerabdruck- und gitterartigen Struktursignale betragen [96.50%, 4.227, 14.958] bzw. [95.056%, 3.725, 11.783]. Nach der Normalisierung lauten sie [1, 1, 1] und [0, 0, 0], was darauf hinweist, dass die fingerabdruckähnliche Mikrostruktur für dieses Experiment besser geeignet ist.

Abbildung 7: Signalreaktionen der fingerabdruckähnlichen Mikrostruktur (a) und der gitterähnlichen Mikrostruktur (b) auf sechs Berührungsmuster
Mikrostrukturverteilung:Kanalabstand
In der fingerabdruckähnlichen Mikrostruktur beeinflusst auch der Abstand zwischen benachbarten Kanälen die Signalqualität.. Die Forscher verglichen die Leistung von Geräten mit einem Kanalabstand von 100, 200 und 300 µm. Die normalisierten Indikatoren der drei waren [1, 0,902, 1], [0,042, 1, 0] bzw. [0, 0, 0,228]. Dies zeigt an, dass die Signalausgabe umso besser ist, je kleiner der Abstand ist.
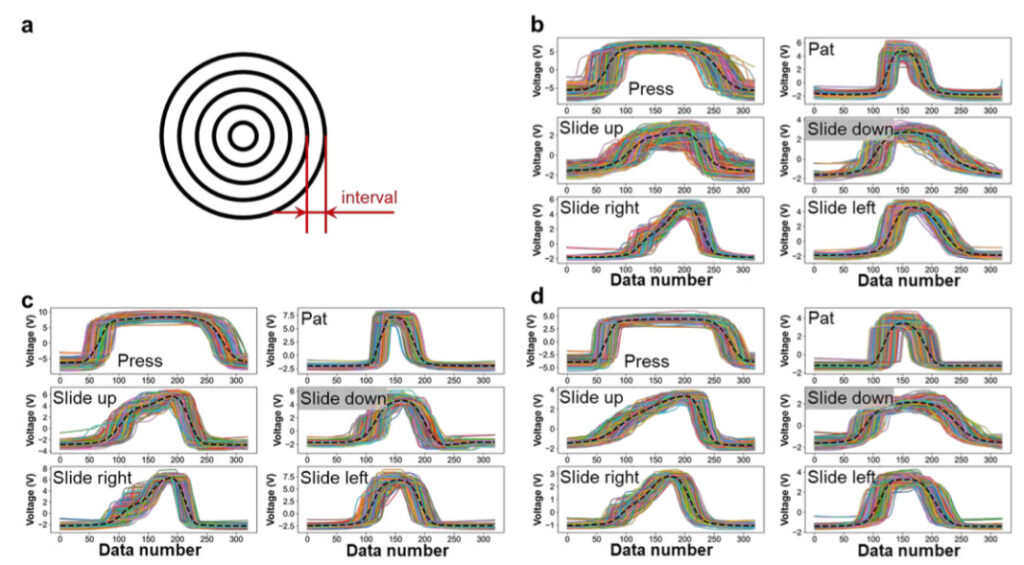
Abbildung 8: Signalantworten verschiedener Kanalabstände auf 6 Berührungsmodi
a: Schematische Darstellung des Kanalabstands der fingerabdruckähnlichen Mikrostruktur;
b&c&d: Signalreaktionen bei einem Kanalabstand von 300 µm, 200 µm bzw. 100 µm.
Die durch die SVM-Optimierung erhaltenen Geräteparameter lassen sich wie folgt zusammenfassen:

Tabelle 1: Zusammenfassung der SVM-Optimierungsparameter und -ergebnisse
Experimentelle Überprüfung:Texterkennung
Dank der durch den SVM-Algorithmus optimierten Parameter kann der TENG-Tastsensor 6 Berührungsmuster genau identifizieren. Daher im SpannungsmessmodusTENG-Tastsensoren können verschiedene Buchstaben unterscheiden und so eine Texterkennung realisieren.
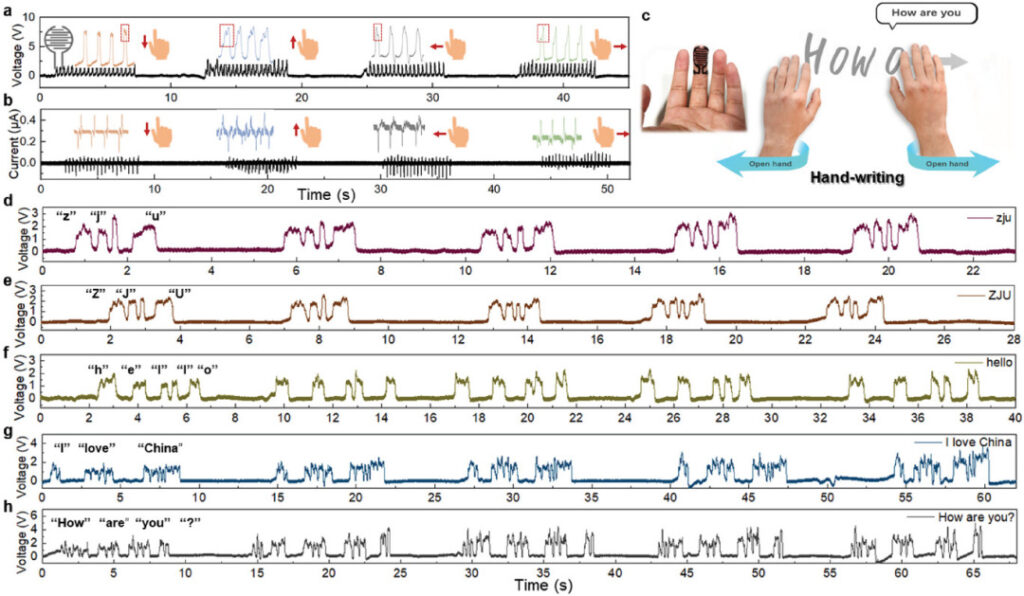
Abbildung 9: Anwendung des TENG-Tastsensors bei der Texterkennung
a&b: Spannungs- und Stromausgabe beim Gleiten nach oben, unten, links und rechts;
c: Schematische Darstellung des Texterkennungsprozesses durch Berührung;
dh: Antwortsignale des TENG-Tastsensors auf verschiedene Sätze.
Bionische Verifizierung:Braille-Erkennung
Um die Tasteigenschaften der menschlichen Haut zu imitieren, wurde der oben erwähnte TENG-Tastsensor zum Testen der Braille-Erkennung an einer Roboterhand befestigt. Zunächst werden die Berührungssignale von 10 Braille-Zahlen von der Roboterhand erfasst. Anschließend wird das schwache Signal während des Gleitvorgangs durch Hochpassfilterung extrahiert.

Abbildung 10: Berührungssignale von 10 Braille-Ziffern (links) und Dimensionsreduktionsverteilung (rechts)
Diese Braille-Zahlen weisen einen hohen Ähnlichkeitsgrad auf und sind schwer zu erkennen. Zu diesem Zweck verwendeten die Forscher CNN zum Merkmalslernen und zur Klassifizierung. Die Klassifizierungsgenauigkeit von CNN beträgt 96.12%, nur für die drei Braille-Zahlen 0, 3 und 8 mit hoher Ähnlichkeit ist die Genauigkeit gering.
Um die Machbarkeit in praktischen Anwendungen zu überprüfen, verwendeten die Forscher einen Roboterarm, um eine Echtzeiterkennung von 11-stelligen Braille-Telefonnummern durchzuführen. Nachdem ein Satz von Braille-Telefonnummern ausgedruckt wurde, kann die Roboterhand jede Ziffer nacheinander erkennen, in Echtzeit Feedback geben und es auf einer grafischen Benutzeroberfläche (GUI) anzeigen.

Abbildung 11: TENG-Tastsensor zur Echtzeiterkennung von Braille-Telefonnummern
Die obigen Ergebnisse zeigen, dassDer SVM-optimierte TENG-Tastsensor kann Text durch Kontakt effektiv erkennen, verbessert die Interaktion zwischen Maschinen und Umgebung und soll neue Lösungen für die Unterstützung von Menschen mit Behinderungen bieten.
TENG-Tastsensor
Die ersten Biosensoren basierten auf Antigen-Antikörper-Immunreaktionen oder DNA-Doppelstrangreaktionen.Diese Sensoren sind sehr genau, werden jedoch hauptsächlich in der Molekularbiologie eingesetzt und sind für die biologische Überwachung im großen Maßstab schwierig einzusetzen.
Nachdem das Konzept des „Internet der Dinge“ vorgeschlagen wurde,Forscher beginnen mit der Entwicklung kostengünstiger, großformatiger Biosensoren mit hohem Durchsatzentstand eine Reihe von Umweltsensoren, darunter auch taktile Sensoren.

Abbildung 12: Entwicklungsgeschichte der Biosensoren
Frühe taktile Sensoren basierten auf Widerstand, Kapazität, Piezoelektrizität und thermoelektrischen Effekten.Diese Komponenten vergrößern die Größe des Sensors erheblich und schränken seine Verwendung in vielen Szenarien ein..
Nach der Einführung von TENG im Jahr 2012 traten Forschung und Entwicklung taktiler Sensoren in eine neue Phase ein.TENGs im Nanomaßstab können in verschiedene flexible Substrate eingebettet werden, um tragbare Sensoren zu bilden, die wiederum zu Konzepten wie elektronischer Haut führen.
Die Entwicklung herkömmlicher TENG-Tastsensoren beruht jedoch hauptsächlich auf der Erfahrung des Forschungsteams, Literaturrecherchen und zahlreichen Versuchen und Irrtümern. Jetzt,Mithilfe von KI kann die Forschung und Entwicklung von TENG-Tastsensoren von erfahrungsorientiert auf anwendungsorientiert umgestellt werden, wodurch der F&E-Zyklus und die Kosten erheblich reduziert, die F&E-Umsetzung beschleunigt, die TENG-Tastsensoren mit der Nachfrageseite verknüpft und das Leben der Menschen komfortabler gestaltet werden kann.
Referenzlinks:
[1]https://www.mdpi.com/1424-8220/17/11/2653
[2]https://onlinelibrary.wiley.com/doi/full/10.1002/adma.202008276








