Command Palette
Search for a command to run...
Gradslam (∇SLAM) Open Source: Dokumente Und Code Sind Alle Verfügbar

∇SLAM, vorgeschlagen von einem Team aus Montreal und der Carnegie Mellon University in einem auf der ICRA 2020 veröffentlichten Artikel, löst ein offenes Problem, mit dem aktuelle SLAM-Systeme häufig konfrontiert sind.
In den letzten zwei Jahren hat mit der rasanten Entwicklung intelligenter Geräte wie autonom fahrender Fahrzeuge und Drohnen auch eine Schlüsseltechnologie dahinter – SLAM (Simultaneous Localization And Mapping) – an Bekanntheit gewonnen.
SLAM hat eine über 30-jährige Geschichte. Es handelt sich um eine Schlüsseltechnologie für Maschinen, um Zustände wahrzunehmen und einzuschätzen und autonome Operationen in unbekannten Umgebungen durchzuführen.Maschinen müssen Aufgaben wie Pfadplanung und Navigation ausführen und AR und VR müssen stabile dreidimensionale Räume aufbauen. Diese Technologien sind alle auf die Unterstützung von SLAM angewiesen.
Vereinfacht ausgedrückt beantwortet SLAM zwei Fragen:„Wo bin ich?“ und „Was ist in meiner Umgebung?“
Kehrroboter beispielsweise nutzen Lidar oder Kameras in Kombination mit SLAM-Technologie, um die Anordnung jeder Ecke des Raums genau zu erfassen und dann eine Umgebungskarte zu erstellen, um auf Grundlage dieser Informationen ihren Reinigungspfad zu planen.

Nach Jahren der Entwicklung stehen herkömmliche SLAM-Algorithmen jedoch immer noch vor dem Problem der End-to-End-Nichtdifferenzierbarkeit. Ein von einem Team der Universität Montreal und der Carnegie Mellon University auf der ICRA 2020 veröffentlichtes Papier schlug eine Lösung für dieses Problem vor.
∇SLAM, Lösung des Engpassproblems des klassischen SLAM-Algorithmus
Zu den klassischen SLAM-Algorithmen zählen derzeit Kinect-Fusion, PointFusion und ICP-SLAM.Da jedoch viele Komponenten dieser Methoden nicht differenzierbar sind, war das Repräsentationslernen für SLAM immer ein ungelöstes Problem. Dies ist auch zu einem Engpass geworden, der die Entwicklung von SLAM behindert.
Um solche Probleme zu lösen, begannen viele Forscher, Deep Learning einzusetzen. Die meisten dieser Studien beschränken sich jedoch auf virtuelle Datensätze oder bestimmte Umgebungen und opfern sogar die Effizienz zugunsten der Genauigkeit. Daher sind sie nicht praktisch genug.
Im Mai dieses Jahres veröffentlichte ein Team der Universität Montreal und der Carnegie Mellon University auf der ICRA 2020 (International Conference on Robotics and Automation), einer wichtigen Konferenz im Bereich Robotik und künstliche Intelligenz, ein Papier„∇SLAM: Dichtes SLAM trifft auf automatische Differenzierung“wird eine Lösung für das obige Problem vorgeschlagen.
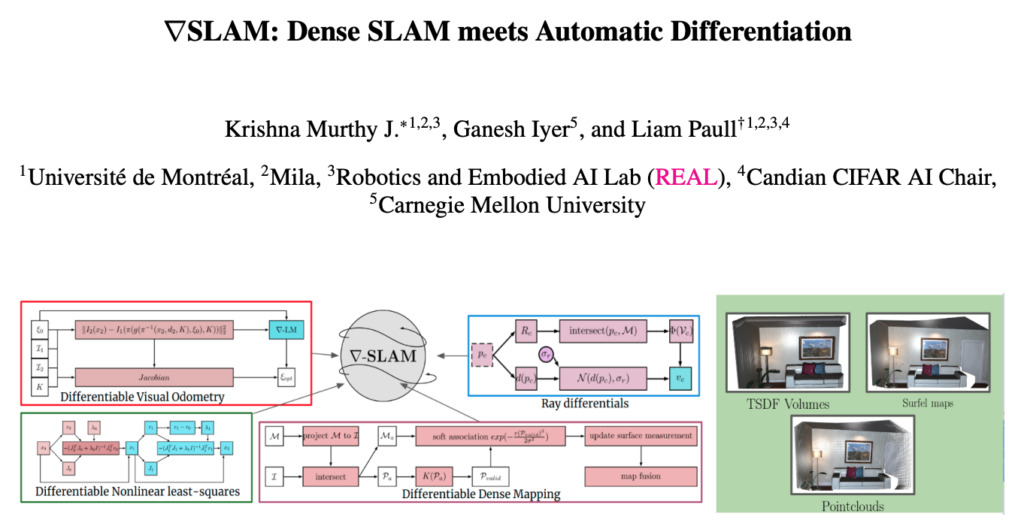
Der Autor weist darauf hin, dass es im dichten Abbildungssystem von SLAM, wie etwa Optimierungsproblemen und Raycast-Problemen, viele Einheiten gibt, die nicht differenzierbar sind, was auch dazu führt, dass die gradientenbasierte Methode in SLAM nicht sehr erfolgreich ist.
Als Reaktion darauf schlugen die Autoren in dem Artikel Gradslam (∇SLAM) vor, einen differenzierbaren Computergraphen auf SLAM. Mit der automatischen Differenzierungsfunktion des Berechnungsgraphen, GradSlam (∇SLAM) ermöglicht gradientenbasiertes Lernen zwischen jeder seiner Komponenten oder dem gesamten System.

Ein vollständig differenzierbares SLAM-System würde aufgabengesteuertes Repräsentationslernen ermöglichen, da das Fehlersignal, das die Aufgabenausführung darstellt, durch das SLAM-System zurück zu den Rohdaten der Sensorbeobachtung übertragen werden kann.
Das Endergebnis ist, dass das Team einen differenzierbaren Trust-Region-Optimierer, ein Oberflächenmess- und Fusionsschema sowie eine Differenzierung über Strahlen ohne Leistungseinbußen entwickelt hat.Diese Fusion aus dichtem SLAM und Computergrafik ermöglicht es uns, von 3D-Karten zurück zu 2D-Pixeln zu arbeiten und eröffnet neue Möglichkeiten für gradientenbasiertes SLAM-Lernen.
Die Autoren geben an, dass das Gradslam-Framework (∇SLAM) sehr verallgemeinerbar ist und auf jedes bestehende SLAM-System erweitert und differenzierbar gemacht werden kann.
Differenzierbare Methode verbessert 3D-Rekonstruktion
Das Team implementierte typische SLAM-Methoden ICP-Odometry, ICP-SLAM, Kinect-Fusion und PointFusion als differenzierbare Computergraphen und analysierte den Vergleich zwischen jeder Methode und ihrem nicht differenzierbaren Gegenstück.
Die Ergebnisse zeigen, dass:Es bietet gute Leistungen bei der ICP-Odometrie und ICP-SLAM-Kartierung, wobei sowohl der absolute Flugbahnfehler als auch der relative Posenfehler auf einem niedrigen Niveau liegen.Wie in der folgenden Tabelle gezeigt:

Die offizielle Adresse des Projekts:
https://github.com/gradslam/gradslam, können Sie es ausprobieren und die Vorteile der Gradslam-Lösung (∇SLAM) erleben.
Neben Github haben wir auch einen inländischen Dienst gefunden, der einfach zu bedienen ist. Die Container-Service-Plattform für Rechenleistung OpenBayes hat außerdem ein Tutorial zum Modelltraining veröffentlicht, das direkt in JupyterNotebook ausgeführt werden kann.
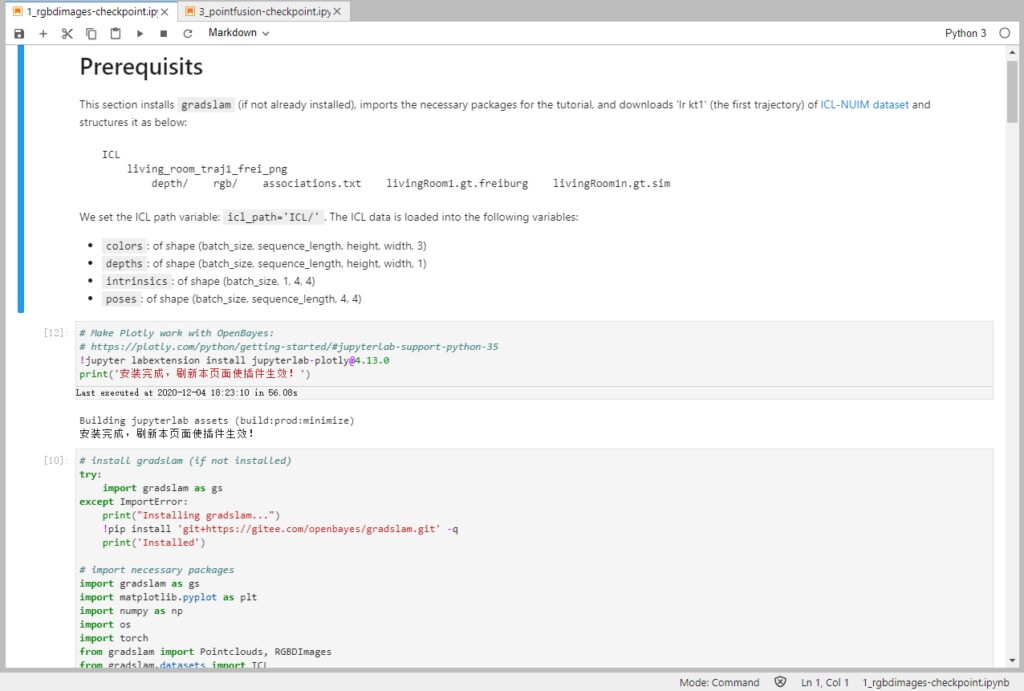
Ich brauche nurZugang openbayes.com Durch die Registrierung können Sie verschiedene Rechenleistungsressourcen wie CPU, NVIDIA T4, NVIDIA Tesla V100 usw. erhalten. Aktuell werden Ihrem Konto während der internen Testphase wöchentlich kostenlose Rechenleistungskontingente gutgeschrieben.
OpenBayes bietet nicht nur verschiedene Container mit Rechenleistung, sondern auch öffentliche Datensätze, vortrainierte Modelle und Jupyter-Notebooks für viele beliebte Projekte, die zur einfachen Bedienung mit einem Klick ausgeführt werden können.
Anweisungen zur Registrierung
- openbayes.com besuchen
- Mit Einladungscode: HyperAI
Registrieren Sie sich als neuer Benutzer, um
- Freies CPU-Kontingent:300 Minuten/Woche
- Freies vGPU-Kontingent:180 Minuten/Woche
Gradslam (∇SLAM) Betriebsanleitung
- Nach der Registrierung von Openbayes
- Zugriff auf die Konsole – Öffentliches Tutorial
Die SLAM-Technologie wird in der Branche als Spitzentechnologie der räumlichen Positionierungstechnologie im Sichtfeld anerkannt. Von Drohnen bis hin zu unbemanntem Fahren, von Kehrrobotern bis hin zu VR/AR-Bereichen ist SLAM in diesen beliebten Bereichen zu sehen.
Wenn Sie also auch die neuesten wissenschaftlichen Forschungsergebnisse im Bereich SLAM erfahren möchten, können Sie sich dieses Wochenende auch mit dem Gradslam-Projekt (∇SLAM) befassen.
Papieradresse:
GitHub-Adresse des Projekts:
https://github.com/gradslam/gradslam
Gradslam (∇SLAM) Jupyter Notebook-Adresse:
https://openbayes.com/console/openbayes/containers/HoveymNsfrT