HyperAI
Command Palette
Search for a command to run...
Oxford Radar RobotCar Radar Dataset
Date
3 years ago
Organization
Publish URL
Paper URL
License
Other
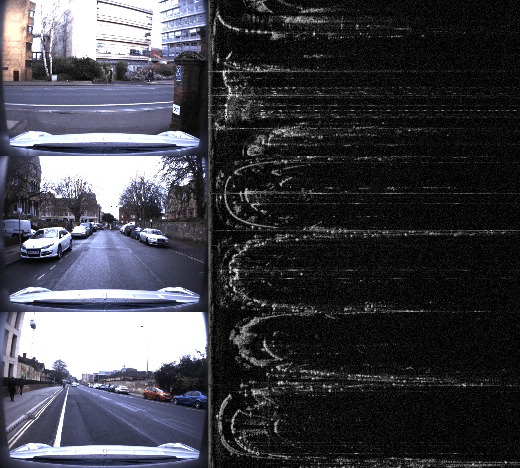
Oxford Radar RobotCar is a radar extension of the Oxford RobotCar dataset. The data was obtained by observing a route in central Oxford, UK. The data was collected in January 2019, crossing a route in the center of Oxford 32 times, for a total of 280 km of urban driving. The dataset contains a variety of weather, traffic, and lighting conditions.
Sensor types and data size of this dataset:
- 240,000 scans from a Navtech CTS350-X radar;
- 2.4 million scans from Dual Velodyne HDL-32E LIDARs;
- 6 cameras, 2 2D LIDARs, and a GPS/INS receiver;
- Ground truth optimized radar ranging method
This dataset is contributed by community users and is intended for educational and informational purposes only. If any content involves copyright infringement, please contact us at [email protected] for prompt review and removal.
Build AI with AI
From idea to launch — accelerate your AI development with free AI co-coding, out-of-the-box environment and best price of GPUs.
AI Co-coding
Ready-to-use GPUs
Best Pricing
HyperAI Newsletters
Subscribe to our latest updates
We will deliver the latest updates of the week to your inbox at nine o'clock every Monday morning
Powered by MailChimp