ROCKET-2는 CraftJarvis 팀이 2025년 3월 21일에 출시한 크로스 뷰 타겟 정렬을 위한 시각적 동작 제어 프레임워크입니다. 로봇 공학 분야의 복잡한 작업 제어 문제를 해결하는 데 중점을 둡니다. 이 프로젝트는 혁신적인 다중 시점 타겟 정렬 기술을 통해 동적 환경에서 시각적 동작 전략(Visuomotor Policy)의 일반화 능력과 제어 가능성을 크게 향상시킵니다. 관련 논문 결과는 다음과 같습니다.ROCKET-2: 교차 관점 목표 정렬을 통한 시각 운동 정책 조정".
이 튜토리얼에서는 단일 RTX 4090 카드에 대한 리소스를 사용합니다.
2. 프로젝트 예시
3. 작업 단계
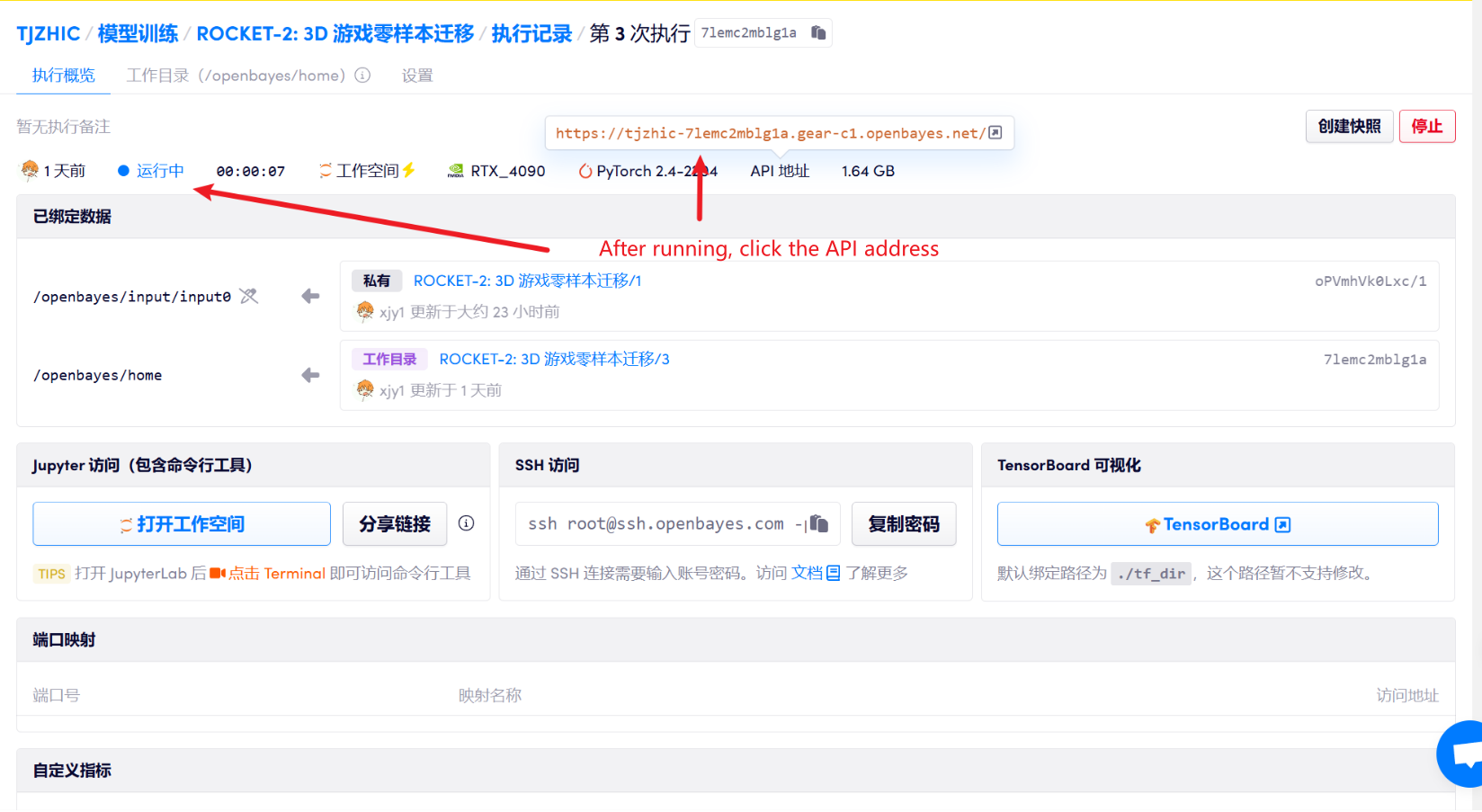
1. 컨테이너 시작 후 API 주소를 클릭하여 웹 인터페이스로 진입합니다.
"잘못된 게이트웨이"가 표시되면 모델이 초기화 중임을 의미합니다. 모델이 크기 때문에 1~2분 정도 기다리신 후 페이지를 새로고침해 주세요.
2. 웹페이지에 접속 후 모델과 대화를 시작할 수 있습니다.
사용 방법
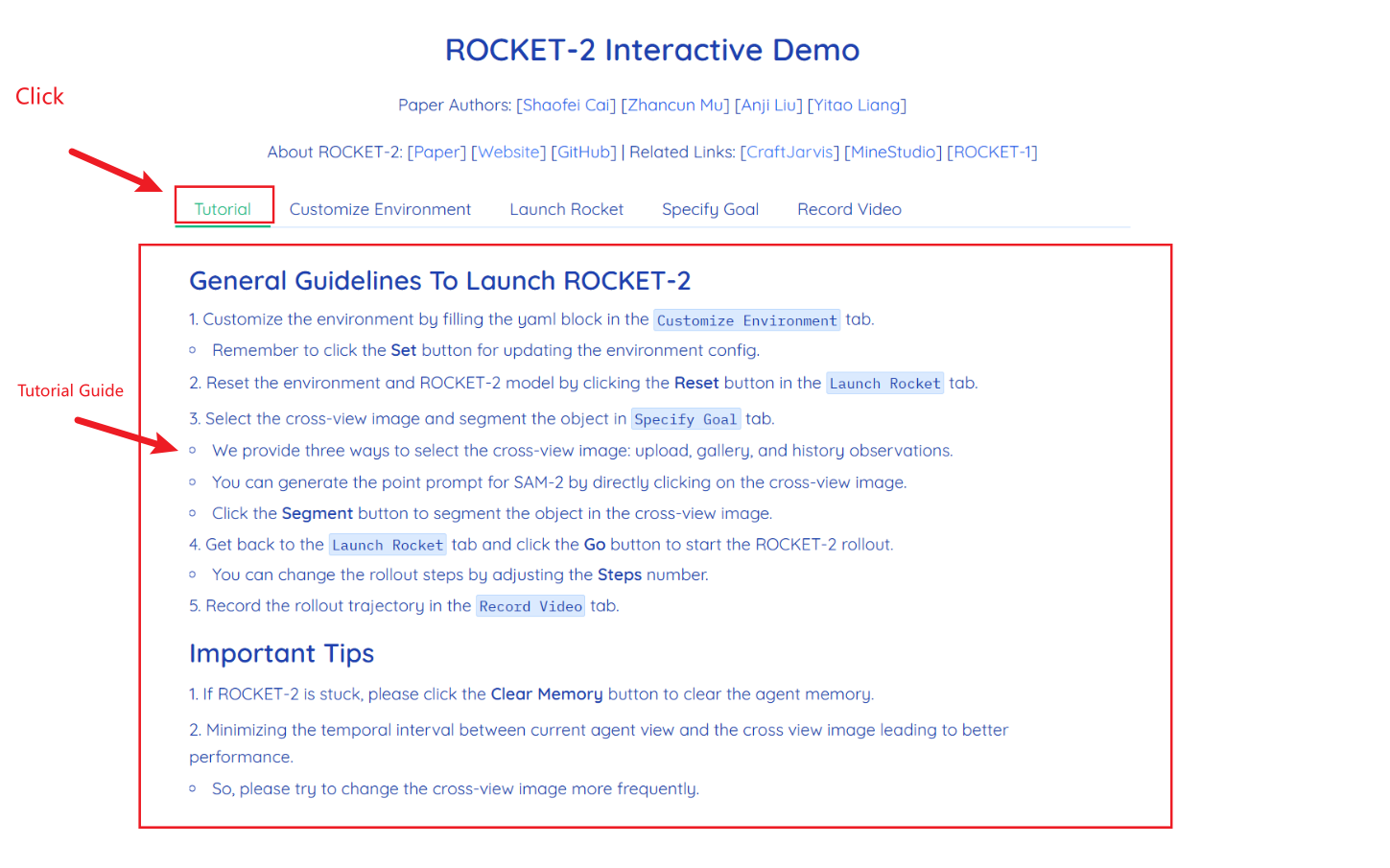
튜토리얼 가이드를 보려면 튜토리얼로 이동하세요.
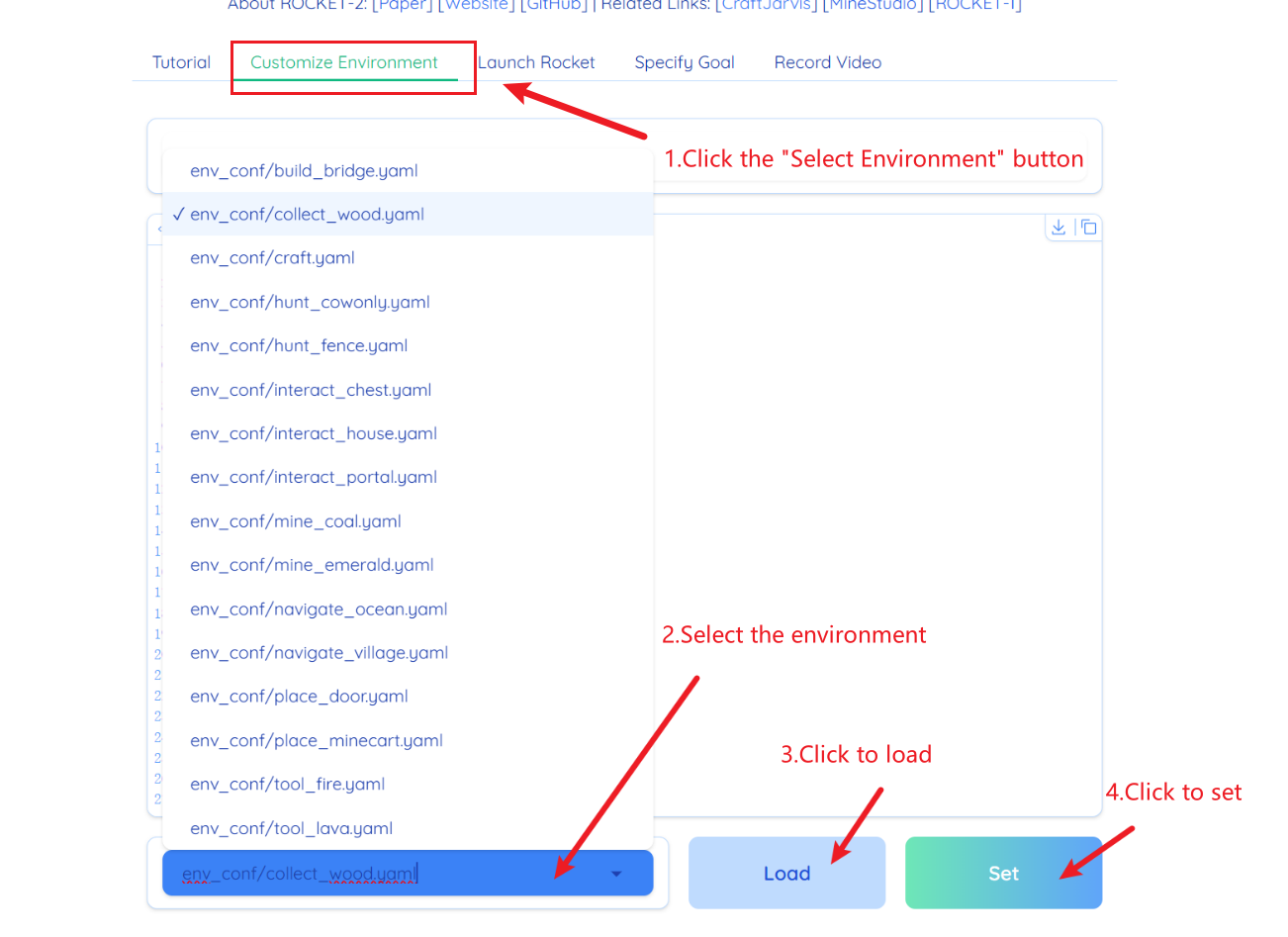
사용자 지정 환경을 입력하고 로드하려는 환경을 선택하세요.
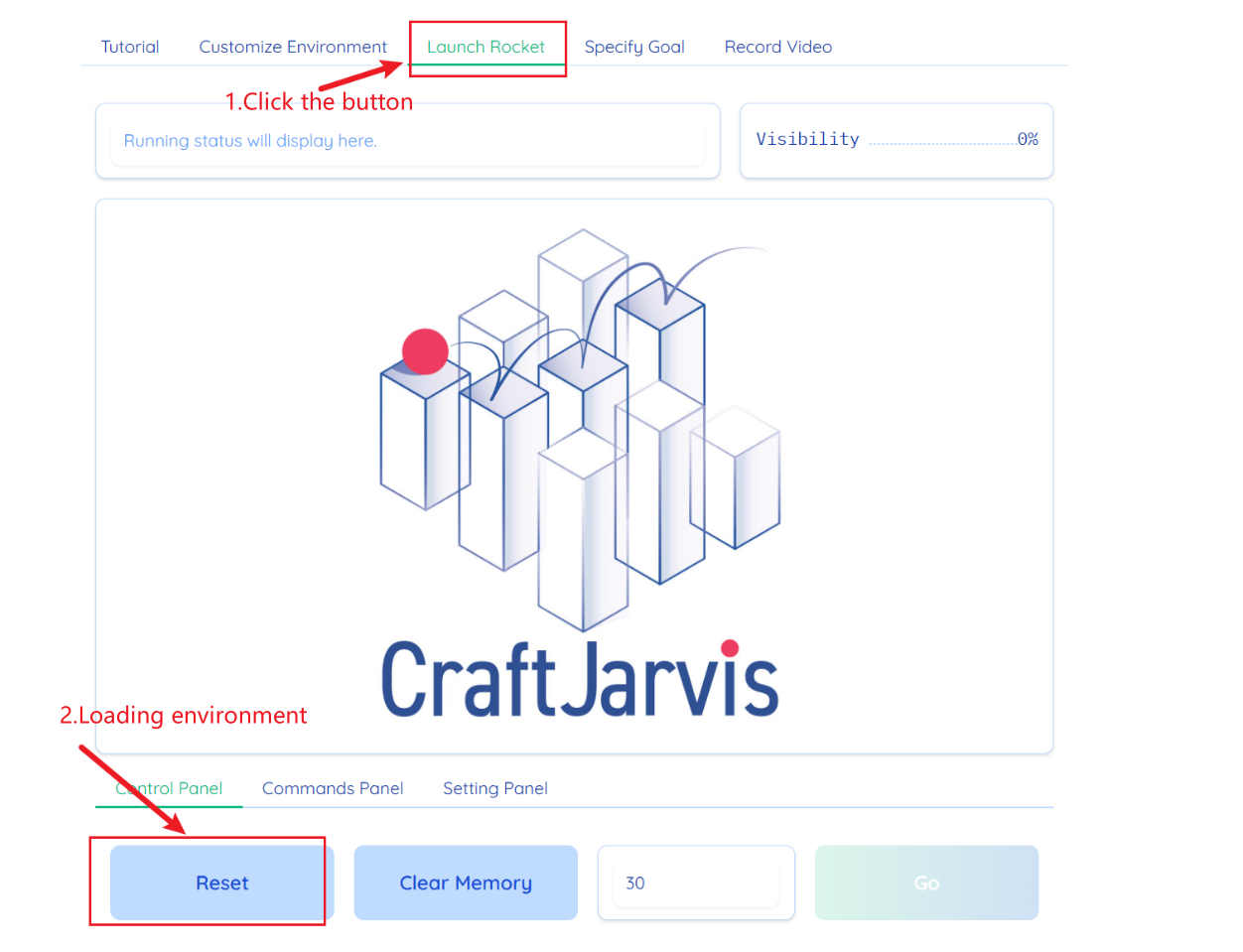
Launch Rocket 로딩 환경으로 들어가세요
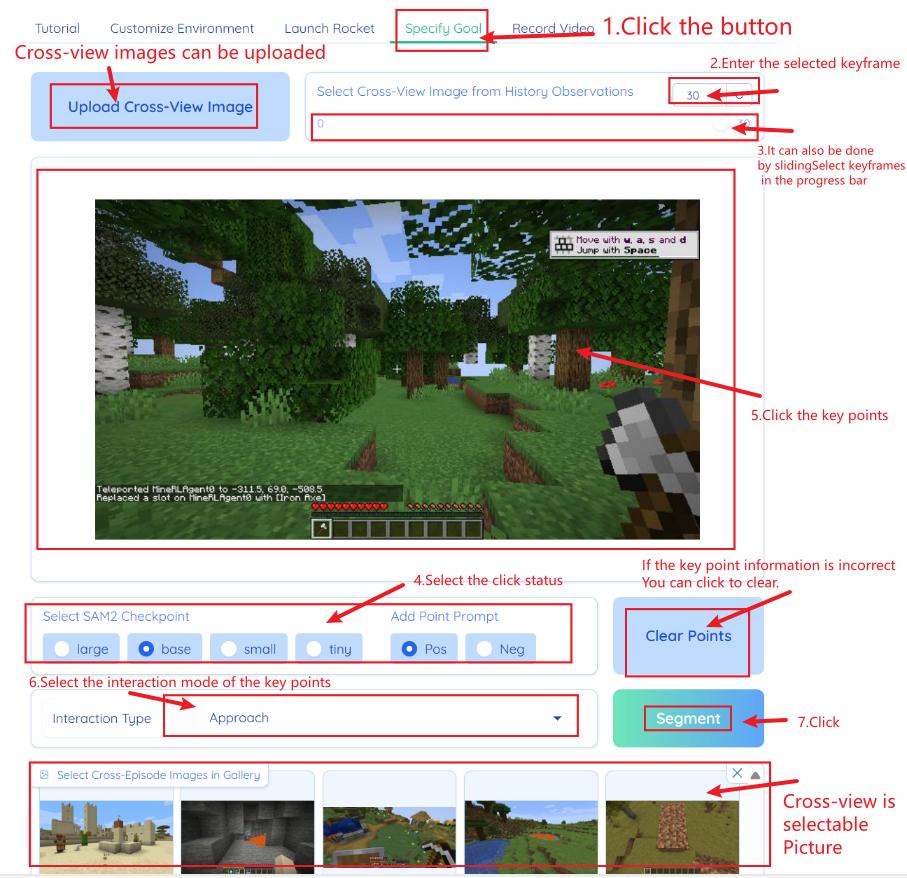
목표 지정을 입력하고 대상 지점과 상호 작용 방법을 선택합니다.
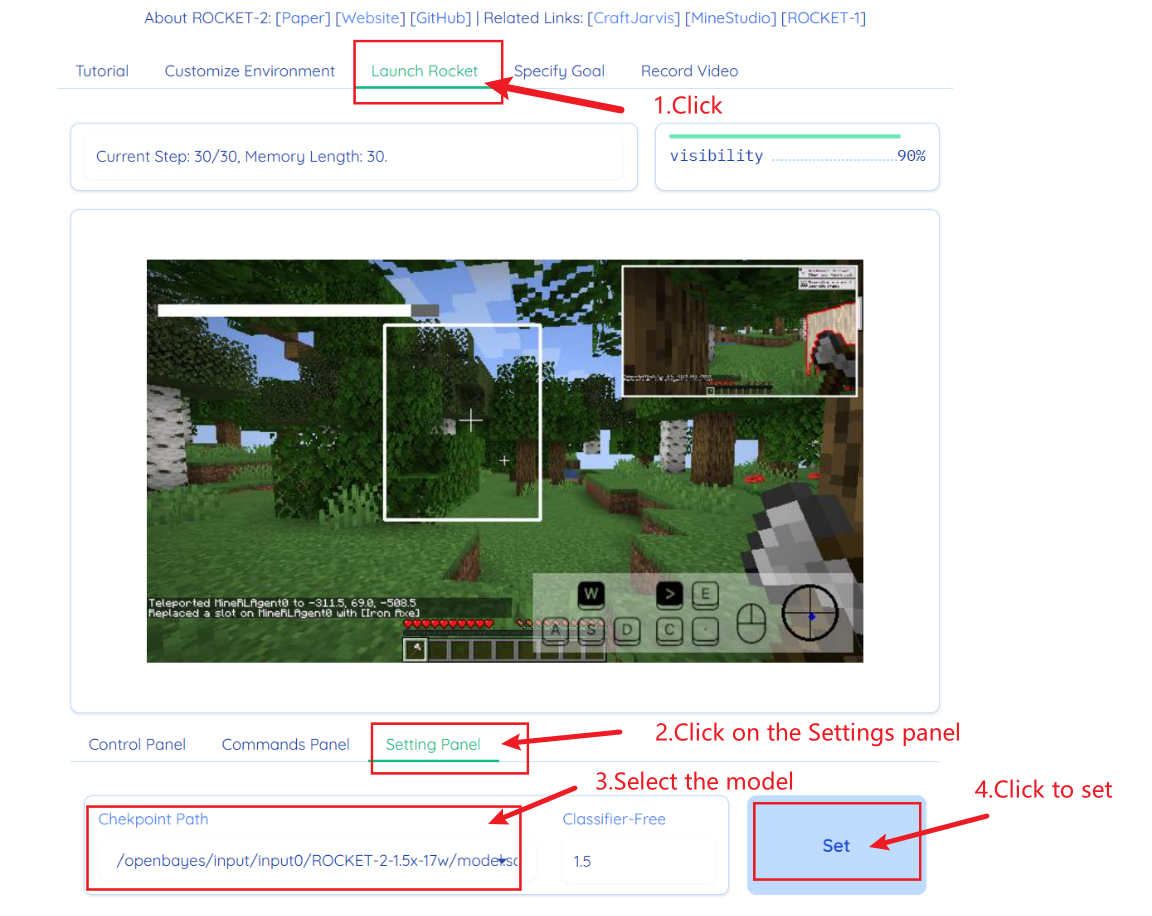
Launch Rocket의 설정 패널에 들어가서 모델을 선택하세요.
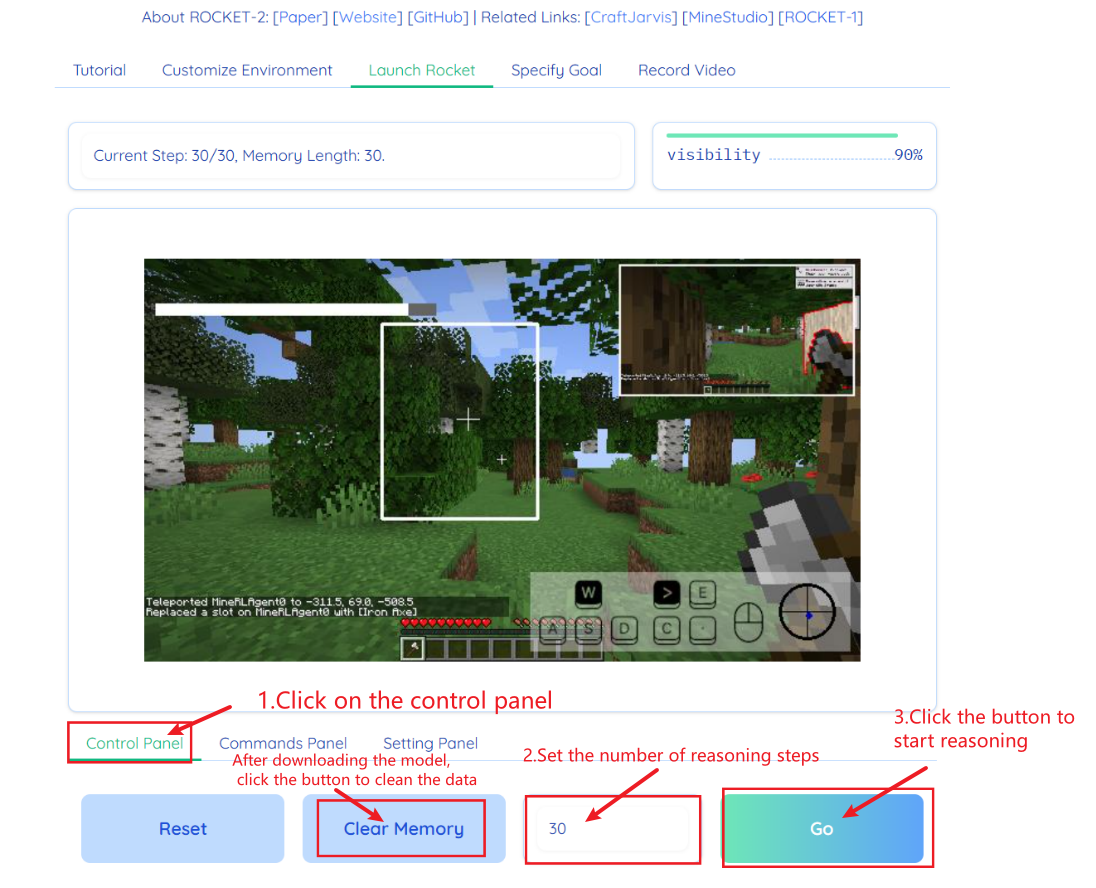
추론 단계를 설정하고 추론을 수행하려면 Launch Rocket의 제어판을 입력하세요.
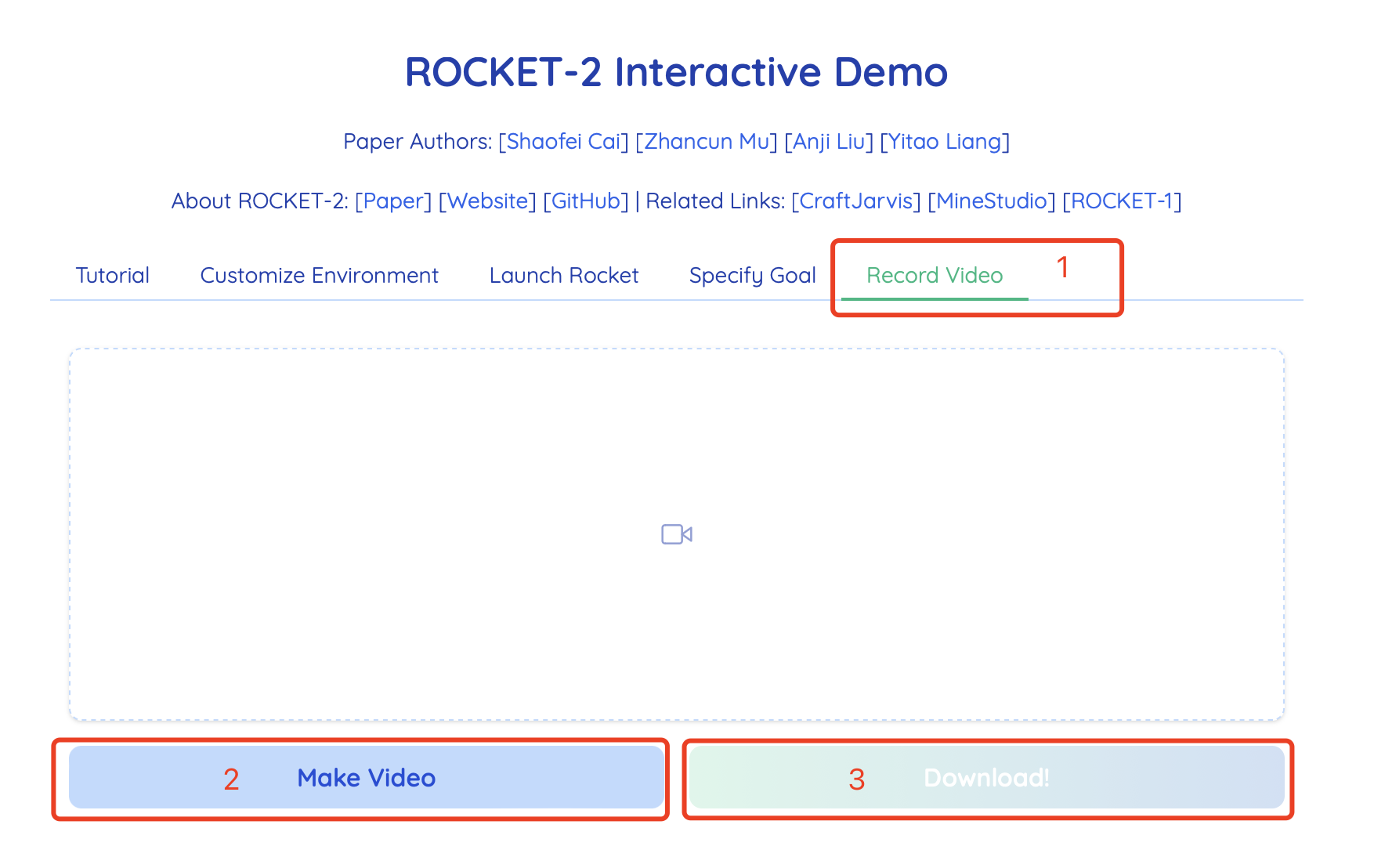
추론 과정이 완료될 때까지 4~6단계를 반복합니다. 그런 다음 비디오 녹화 모드로 들어가 비디오를 만들고 다운로드하세요. 이 영상은 온라인에서 볼 수 없습니다.
4. 토론
🖌️ 고품질 프로젝트를 발견하시면, 백그라운드에 메시지를 남겨 추천해주세요! 또한, 튜토리얼 교환 그룹도 만들었습니다. 친구들의 QR코드 스캔과 [SD 튜토리얼] 댓글을 통해 그룹에 가입하여 다양한 기술 이슈에 대해 논의하고 신청 결과를 공유해 주시기 바랍니다.↓
인용 정보
이 프로젝트에 대한 인용 정보는 다음과 같습니다.
@article{cai2025rocket,
title={ROCKET-2: Steering Visuomotor Policy via Cross-View Goal Alignment},
author={Cai, Shaofei and Mu, Zhancun and Liu, Anji and Liang, Yitao},
journal={arXiv preprint arXiv:2503.02505},
year={2025}
}
AI로 AI 구축
아이디어에서 출시까지 — 무료 AI 공동 코딩, 즉시 사용 가능한 환경, 최적 가격 GPU로 AI 개발을 가속화하세요.