Command Palette
Search for a command to run...
{ Junqiu Wang Shaojun Cai Xin Wu Fei Xue}
초록
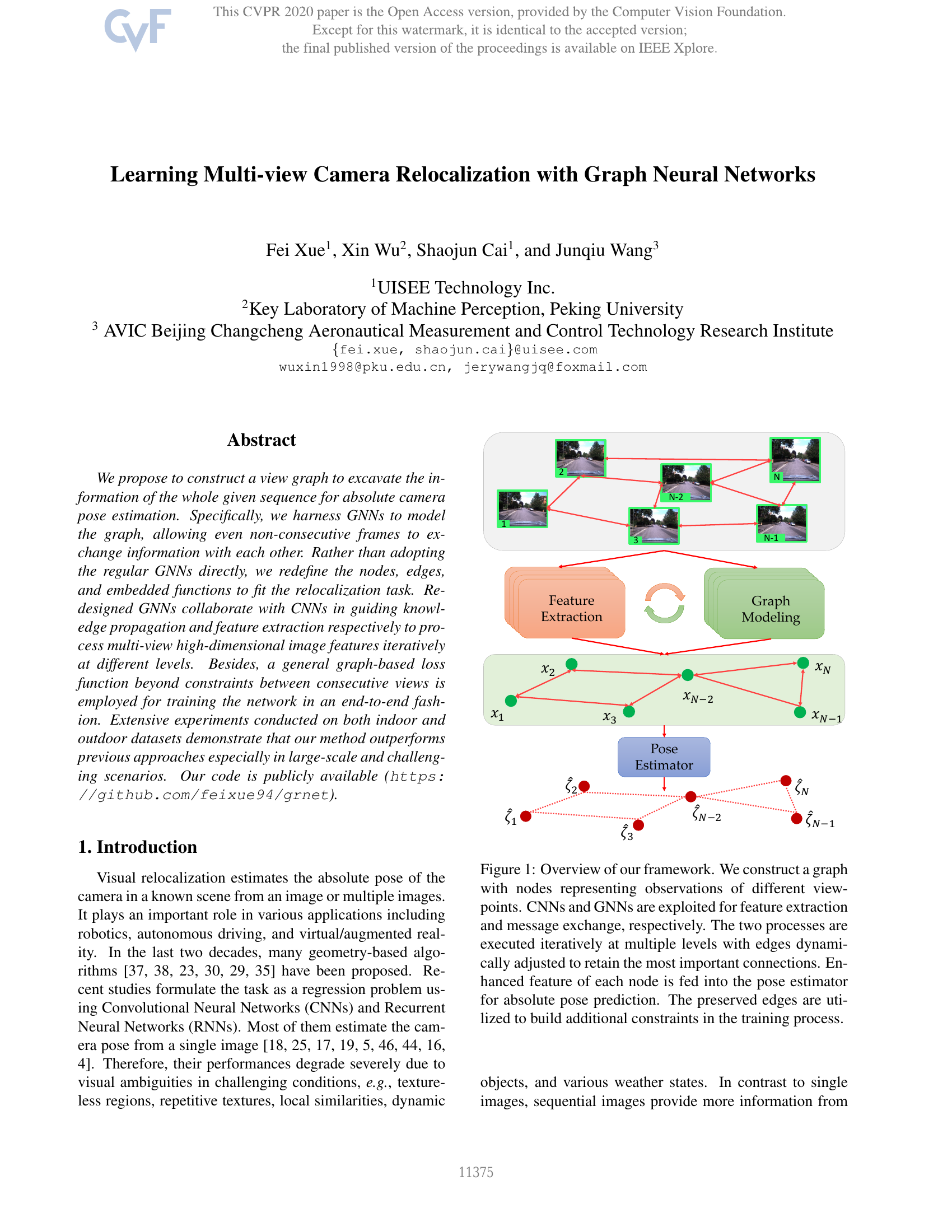
우리는 절대 카메라 자세 추정을 위해 주어진 전체 시퀀스의 정보를 탐색하기 위해 뷰 그래프(view graph)를 구축하는 방법을 제안한다. 구체적으로, GNN(Graph Neural Networks)을 활용하여 그래프를 모델링함으로써 비연속적인 프레임 간에도 정보 교환을 가능하게 한다. 일반적인 GNN을 직접 쓰는 대신, 재현위치 추정(relocalization) 작업에 적합하도록 노드, 엣지 및 임베딩 함수를 재정의한다. 재설계된 GNN은 CNN과 협력하여 각각 지식 전파와 특징 추출을 안내하며, 다양한 수준에서 다중 뷰 고차원 이미지 특징을 반복적으로 처리한다. 또한, 연속된 뷰 간의 제약 조건을 넘어서는 일반적인 그래프 기반 손실 함수를 도입하여 네트워크를 엔드 투 엔드(end-to-end) 방식으로 학습시킨다. 실내 및 실외 데이터셋에서 수행된 광범위한 실험 결과, 본 방법이 대규모 및 도전적인 시나리오에서 기존 방법들을 뛰어넘는 성능을 보임을 입증하였다.
벤치마크
| 벤치마크 | 방법론 | 지표 |
|---|---|---|
| camera-localization-on-oxford-robotcar-full | GNNMapNet | Mean Translation Error: 17.35 |
| visual-localization-on-oxford-robotcar-full | GNNMapNet | Mean Translation Error: 17.35 |