Command Palette
Search for a command to run...
Yikun Wang Zuyan Liu Ziyi Wang Pengfei Liu Han Hu Yongming Rao

초록
다음은 요청하신 영문 기술 초록의 한국어 번역본입니다.[번역]에이전트 시각 추론(agentic visual reasoning)에 관한 최신 연구는 심층적인 멀티모달 이해를 가능하게 했으나, 주로 이미지 조작 도구에 편중되어 있어 보다 범용적인 에이전트 모델로 발전하는 데에는 한계가 있었습니다. 본 연구에서는 세밀한 시각적 그라운딩(visual grounding)뿐만 아니라 추론 과정에서 가설을 검증하고 정처(refresh/refine)하기 위해 웹 검색까지 요구되는 지리적 위치 추정(geolocalization) 작업을 재조명합니다. 기존의 지리적 위치 추정 벤치마크들은 고해상도 이미지에 대한 요구 사항과 심층 에이전트 추론을 위한 난이도를 충족하지 못한다는 점에 착안하여, 당사는 전 세계의 사진 및 파노라마와 다양한 도시의 위성 이미지 하위 집합을 포함하는 GeoBench를 구축하였습니다. 이는 에이전트 모델의 지리적 위치 추정 능력을 엄밀하게 평가하기 위해 고안되었습니다.또한 당사는 추론 루프 내에 도구 호출(tool invocation) 기능을 유기적으로 통합한 에이전트 모델인 GeoVista를 제안합니다. 이 모델에는 관심 영역(ROI)을 확대할 수 있는 이미지 줌인(image-zoom-in) 도구와 관련 웹 정보를 검색할 수 있는 웹 검색 도구가 포함되어 있습니다. 우리는 이를 위해 추론 패턴과 도구 사용에 대한 사전 지식(priors)을 학습하는 콜드 스타트(cold-start) 지도 미세 조정(SFT) 단계와, 추론 능력을 더욱 강화하기 위한 강화 학습(RL) 단계를 포함하는 완전한 학습 파이프라인을 개발했습니다. 아울러 다중 레벨의 지리 정보를 활용하여 전반적인 위치 추정 성능을 향상시키기 위해 계층적 보상(hierarchical reward) 방식을 채택했습니다. 실험 결과, GeoVista는 지리적 위치 추정 작업에서 다른 오픈 소스 에이전트 모델들을 크게 상회하였으며, 대부분의 평가지표에서 Gemini-2.5-flash 및 GPT-5와 같은 비공개(closed-source) 모델과 대등한 성능을 달성한 것으로 나타났습니다.
Summarization
Fudan University and Tsinghua University, jointly with Tencent Hunyuan, propose GeoVista, an agentic model that integrates tool invocation (image zooming and web searching) with a hierarchical reinforcement learning pipeline, alongside a new benchmark GeoBench, achieving geolocalization performance comparable to leading closed-source models.
Introduction
The rapid evolution of Vision-Language Models (VLMs) has enabled deep multimodal reasoning, where models like OpenAI o3 achieve "thinking with images" by interleaving textual Chain-of-Thought with tool usage. The authors focus on real-world geolocalization, a critical application that naturally demands both fine-grained visual clue extraction and external knowledge validation. However, existing open-source attempts often limit themselves to image manipulation tools (like zooming), forcing models to rely solely on internal knowledge without access to external information retrieval (like web search) to verify hypotheses.
To address this, the authors introduce GeoVista, an agentic multimodal model that seamlessly combines visual operations with web search within a dynamic reasoning loop. They also propose GeoBench, a rigorous benchmark featuring high-resolution global imagery, and establish a comprehensive training pipeline involving cold-start Supervised Fine-Tuning (SFT) and Reinforcement Learning (RL).
Research Highlights:
- Holistic Agentic Framework: GeoVista integrates both visual tools (zoom-in) and information retrieval (web search) to enable dynamic, multi-step reasoning and hypothesis verification similar to advanced closed-source models.
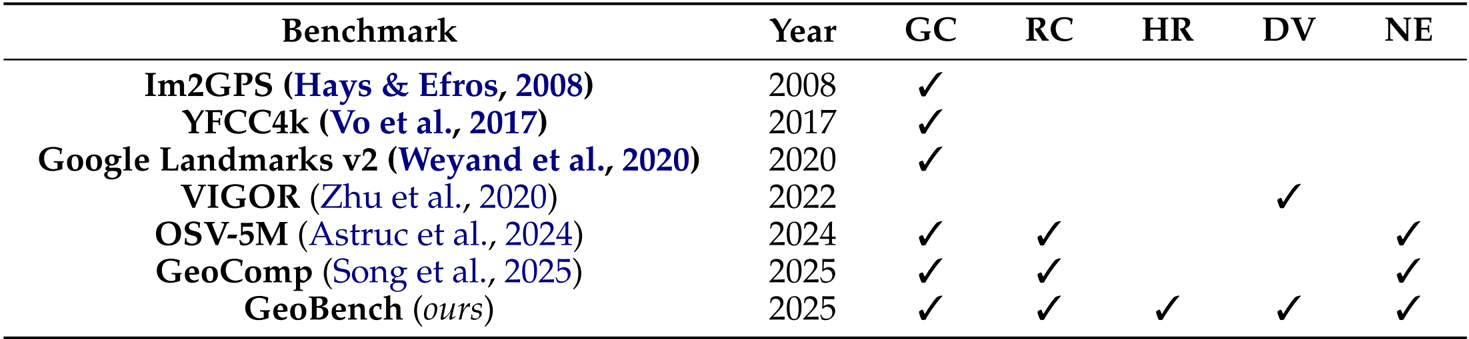
- Challenging Benchmark Construction: The authors propose GeoBench, a dataset comprising high-resolution, globally diverse images designed to rigorously assess geolocalization capabilities through multi-level evaluation.
- Advanced Training Strategy: A complete training pipeline is presented, featuring a cold-start phase based on curated trajectories and an RL stage utilizing Group Relative Policy Optimization (GRPO) with a novel hierarchical reward system to exploit geological label structures.
Dataset
Based on the provided papers, here is a technical overview of the dataset construction and usage strategies employed by the authors:
-
Dataset Overview & Objectives The authors curated GeoBench and the training data for GeoVista with a focus on global distributional diversity. The data collection spans 6 continents, 66 countries, and 108 cities, designed to evaluate general geolocalization capabilities across different data modalities rather than fitting a single data type.
-
Raw Data Composition & Sources To ensure generalizability, the authors collected three distinct types of high-resolution raw data:
- Normal Photos: High-quality images collected from the internet depicting diverse scenarios (e.g., libraries, supermarkets), with a minimum resolution of 1600×1200.
- Panoramas: 360∘ street-view scenes retrieved via the Mapillary API. These were stitched locally into planar panoramas with a fixed resolution of 4096×2048 to suit multimodal LLM inputs.
- Satellite Images: Sentinel-2 Level-2A imagery retrieved from the Microsoft Planetary Computer. The authors mosaicked low-cloud scenes within city bounding boxes, typically sized at 2000×2000.
-
Data Filtering Strategy The authors implemented a Localizability Filtering mechanism to ensure meaningful difficulty by removing two specific categories of data:
- Non-localizable images: Generic scenes lacking geographical clues (e.g., close-up food, indoor rooms, plain landscapes).
- Easily localizable landmarks: Iconic sites likely encountered during VLM pretraining, which would trivialize the reasoning task.
-
Benchmark Statistics The final GeoBench dataset comprises a balanced set of samples sampled from the raw data:
- 512 Standard Photos
- 512 Panoramas
- 108 Satellite Images
-
Metadata & Evaluation Framework
- Automated Labeling: Each sample is paired with precise geolocalization metadata (latitude and longitude).
- Multi-level Annotation: The authors developed labels for Country, Province/State, and City levels to support a hybrid verification pipeline using both rule-based matching and model-based verification (via GPT-4o-mini).
- Nuanced Evaluation: For fine-grained assessment, the authors utilize geocoding services to convert predicted text into coordinates, calculating the Haversine distance between the prediction and ground truth.
Method
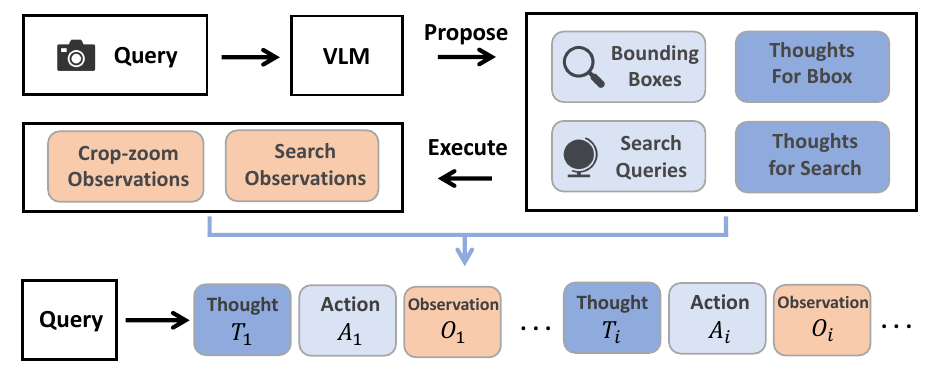
The proposed system, GeoVista, employs an agentic pipeline to perform real-world geolocalization by iteratively reasoning and interacting with the environment. Given a user query and an input image, the policy model generates a sequence of thoughts and actions, which are executed to obtain new observations. These observations are then fed back into the model, forming a continuous thought–action–observation loop. The process terminates when the model decides to output its final geolocation prediction or reaches the maximum number of interaction turns. The policy model has access to two types of tools: a crop-and-zoom tool, which allows it to magnify regions of interest by specifying a bounding box in pixel coordinates, and a web-search tool, which enables it to retrieve up to 10 relevant information sources from the internet based on a generated query. This enables the model to refine its understanding through both visual inspection and external knowledge retrieval. The agentic pipeline is illustrated in the framework diagram, where the policy model processes the user query and iteratively generates actions and observations, with the environment providing feedback through the execution of these actions.

To facilitate the training of the policy model, the authors introduce a cold-start phase that curates reasoning trajectories to provide the model with a prior for multi-turn tool use. Inspired by human geolocalization strategies—where individuals first identify candidate regions and then consult external sources—the authors use a vision-language model (Seed-1.6-vision) to generate multiple bounding boxes and intermediate reasoning steps. After identifying salient geographic cues, the model is prompted to generate web-search queries along with rationales, and finally, to produce a reasoning path leading to a final judgment. These reasoning steps, bounding boxes, and search queries are then assembled into a coherent thinking trajectory with tool calls. This curated dataset of 2,000 examples serves as a supervised fine-tuning signal to encourage the model to engage in multi-turn reasoning and tool use. The process of curating these thinking trajectories is depicted in the figure, where the left panel shows the generation of tool calls and rationales, and the right panel compares the performance of GeoVista with and without the hierarchical reward.
The policy model is trained using reinforcement learning, specifically a vanilla GRPO (Generalized Reward Policy Optimization) setting. In this setup, each question is passed to the policy model, which generates a group of outputs. Rewards are computed based on the correctness of the response, with the optimization objective defined as a clipped surrogate objective that maximizes the expected reward while maintaining policy stability. The reward function is designed to leverage the hierarchical structure of the geolocalization task, where correct answers at finer administrative levels (e.g., city) receive higher rewards than those at coarser levels (e.g., country). Specifically, the reward is defined as ri=β2 for city-level correctness, β for provincial/state-level correctness, 1 for country-level correctness, and 0 otherwise, with β>1. This hierarchical reward structure ensures that the model is incentivized to make precise predictions. The authors empirically set β=2 to balance the reward gaps and prevent excessive or collapsed rewards. The reinforcement learning process is computationally expensive due to the need for multiple response rollouts and web search API usage, which limits the exploration of different β values. The overall training process involves the policy model generating a sequence of thoughts, actions, and observations, which are then used to update the model parameters through reinforcement learning.
Experiment
- Conducted comprehensive evaluations on the GeoBench dataset, comparing GeoVista-7B against leading closed-source systems (e.g., Gemini-2.5-pro, GPT-5) and open-source vision-reasoning models (e.g., Qwen2.5-VL, Mini-o3) to verify geolocalization capabilities.
- Achieved state-of-the-art performance among open-source models, recording 92.64% country-level, 79.60% provincial-level, and 72.68% city-level accuracy, significantly outperforming the base model Qwen2.5-VL-7B (32.57% city accuracy) and narrowing the gap with closed-source counterparts.
- Demonstrated high-precision reasoning with a median haversine distance of 2.35 km and a 52.83% success rate for predictions within 3 km, vastly superior to other open-source baselines (e.g., Qwen2.5-VL with >2000 km median error).
- Validated the training methodology through ablation studies, confirming the critical necessity of Cold-Start SFT, Reinforcement Learning, and Hierarchical Reward, while observing a consistent log-linear performance improvement as RL training data scaled from 1.5k to 12k samples.
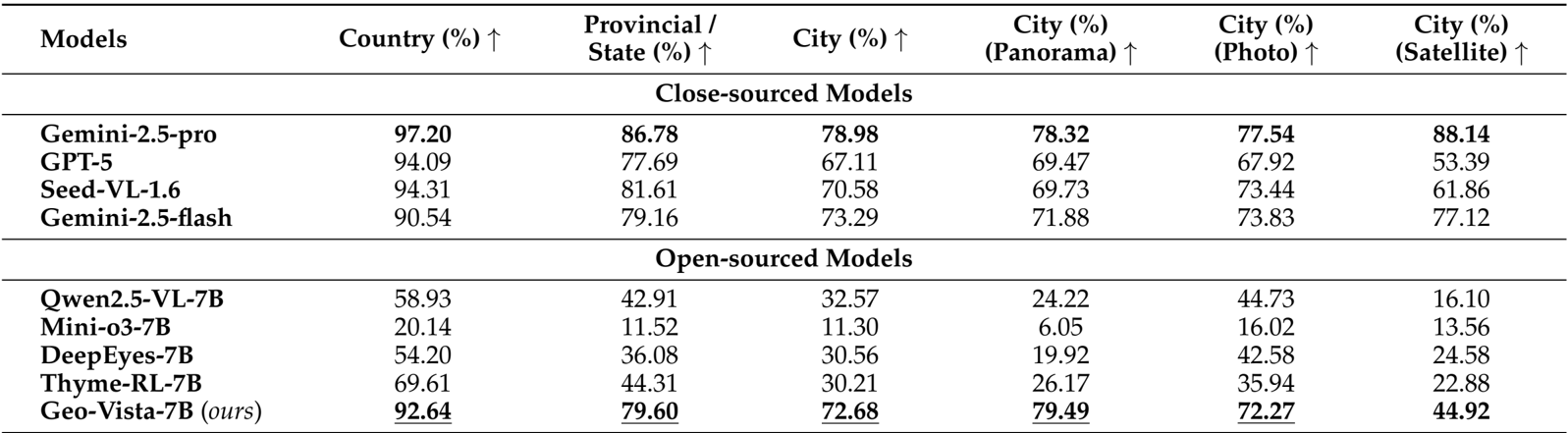
The experimental results on GeoBench demonstrate that GeoVista achieves state-of-the-art performance among open-source models, significantly outperforming other 7B-parameter models across all evaluation metrics. It attains high accuracy at country, provincial, and city levels, with particularly strong performance on panoramas and photos, while also showing competitive nuanced geolocation precision, as measured by the proportion of predictions within 3 km and median haversine distance.
Authors compare GeoVista with both closed-source and open-source models on GeoBench, showing that GeoVista achieves state-of-the-art performance among open-source models, with accuracy surpassing all other open-source counterparts in country, provincial, and city-level geolocalization tasks. It also outperforms most open-source models on city-level accuracy across panorama, photo, and satellite image types, demonstrating strong generalization and reasoning capabilities despite having fewer parameters than closed-source models.
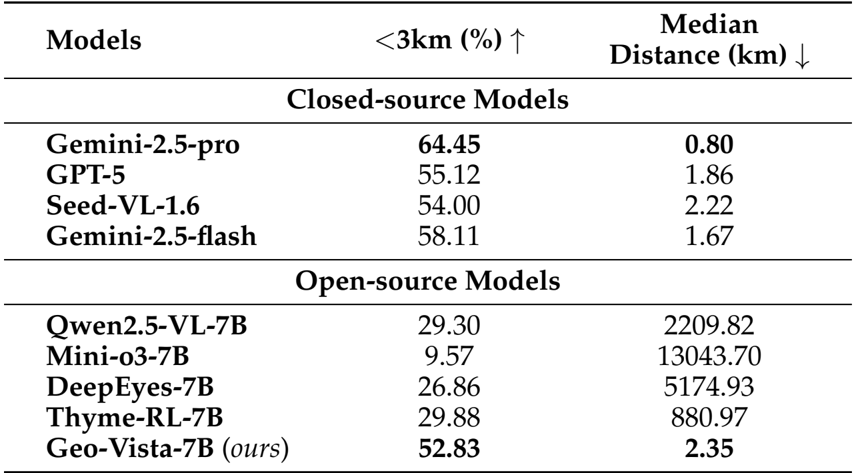
Authors present a nuanced evaluation of model performance on GeoBench, reporting the proportion of predictions within 3 km and the median haversine distance. Results show that GeoVista achieves the highest accuracy within 3 km (52.83%) and the lowest median distance (2.35 km) among open-source models, significantly outperforming others. While still behind Gemini-2.5-pro in both metrics, GeoVista demonstrates strong geolocalization precision, indicating effective reasoning and tool use despite its smaller size.
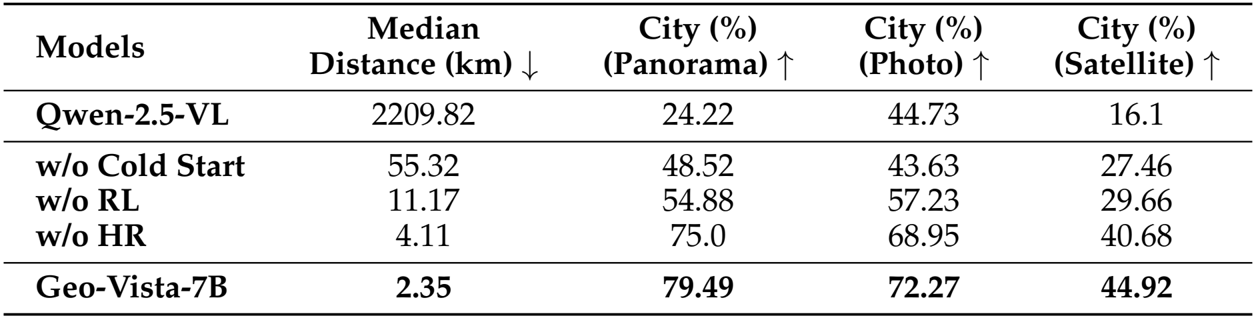
Authors conducted an ablation study to evaluate the impact of key components in the training pipeline, with results presented in the table. The model without cold-start SFT shows a significant drop in performance, indicating its necessity for enabling multi-turn tool use. Removing reinforcement learning leads to a substantial increase in median distance and a decrease in city-level accuracy, demonstrating that SFT alone is insufficient for effective reasoning. Disabling the hierarchical reward further degrades performance, highlighting its importance in guiding the model toward accurate geolocalization. The full Geo-Vista-7B model achieves the best results across all metrics, with a median distance of 2.35 km and high city-level accuracy on panoramas, photos, and satellite images.