Command Palette
Search for a command to run...
Kyungmin Lee Sibeen Kim Minho Park Hyunseung Kim Dongyoon Hwang Hojoon Lee Jaegul Choo
초록
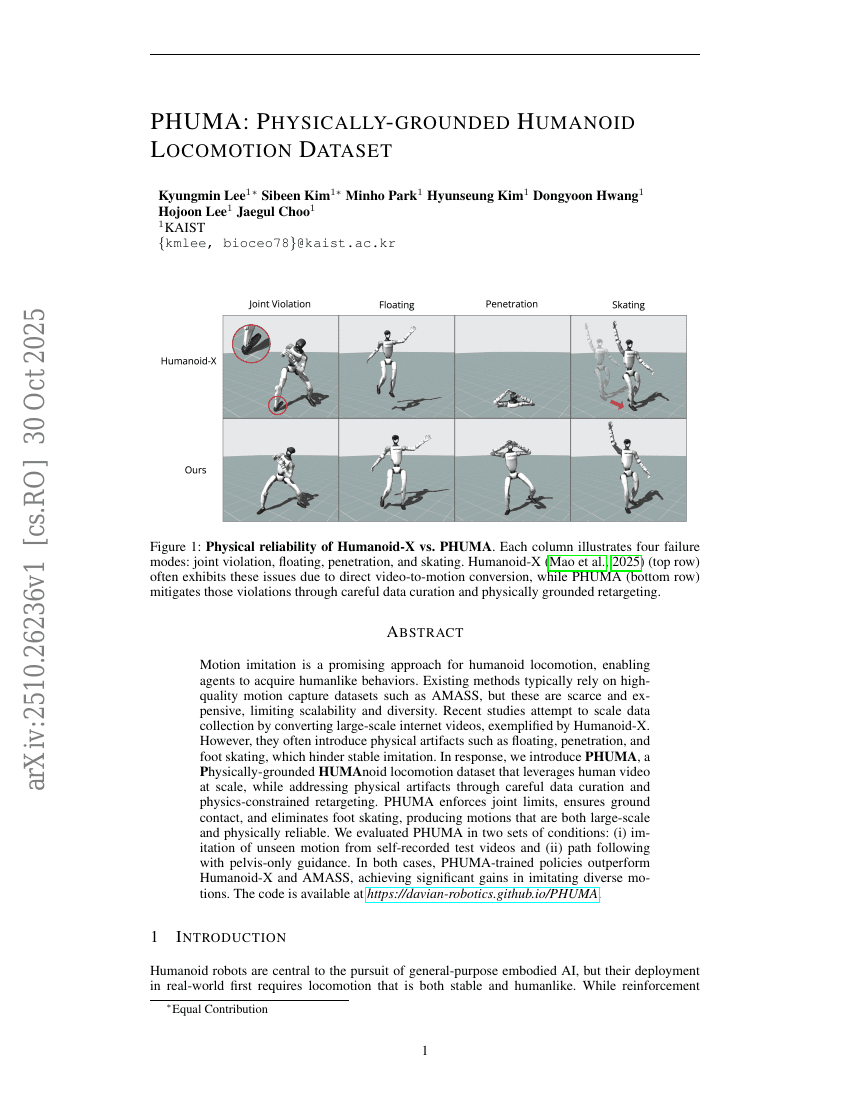
모션 임itation은 인간형 로봇의 보행을 위한 유망한 접근 방식으로, 에이전트가 인간과 유사한 행동을 습득할 수 있도록 한다. 기존의 방법들은 주로 AMASS와 같은 고품질의 모션 캡처 데이터셋에 의존하지만, 이러한 데이터셋은 희소하고 비용이 높아 확장성과 다양성에 한계가 있다. 최근 연구들은 대규모 인터넷 영상으로 데이터 수집을 확장하려는 시도를 하고 있으며, Humanoid-X가 그 대표적인 사례이다. 그러나 이러한 방법들은 떠다니는 현상, 충돌, 발 미끄러짐과 같은 물리적 오류를 자주 유발하여 안정적인 모션 임itation을 방해한다. 이에 대응하여, 본 연구는 대규모 인간 영상을 기반으로 하되, 철저한 데이터 정제와 물리 제약을 반영한 리타겟팅을 통해 물리적 오류를 해결하는 '물리 기반 인간형 보행 데이터셋(PHUMA)'을 제안한다. PHUMA는 관절 제한을 강제하고, 지면 접촉을 보장하며, 발 미끄러짐을 제거함으로써 대규모이면서도 물리적으로 신뢰할 수 있는 모션을 생성한다. 우리는 PHUMA를 두 가지 상황에서 평가하였으며, (i) 자가 기록한 테스트 영상에서 볼 수 없는 모션에 대한 임itation, (ii) 골반만을 이용한 경로 추종이다. 두 경우 모두 PHUMA로 훈련된 정책이 Humanoid-X와 AMASS를 상회하며, 다양한 모션을 보다 효과적으로 재현하는 데서 상당한 성과를 달성하였다. 코드는 https://davian-robotics.github.io/PHUMA 에서 공개되어 있다.