4달 전
Fast-Poly: 3D 다중 객체 추적을 위한 빠른 다면체 프레임워크
Li, Xiaoyu ; Liu, Dedong ; Wu, Yitao ; Wu, Xian ; Zhao, Lijun ; Gao, Jinghan
초록
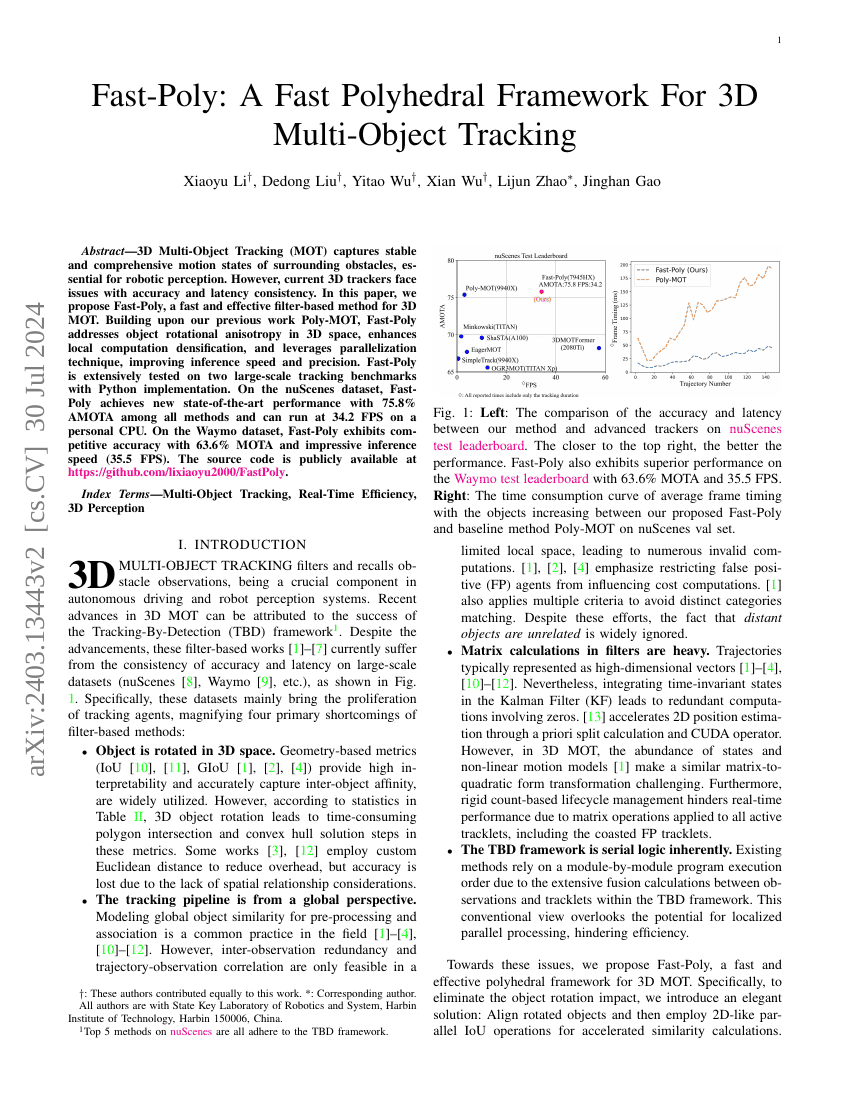
3D 다중 객체 추적(Multi-Object Tracking, MOT)은 로봇 인식에 필수적인 주변 장애물의 안정적이고 포괄적인 운동 상태를 캡처합니다. 그러나 현재의 3D 추적기들은 정확성과 지연 시간 일관성 문제를 겪고 있습니다. 본 논문에서는 이러한 문제를 해결하기 위해 빠르고 효과적인 필터 기반 방법인 Fast-Poly를 제안합니다. 이전 연구인 Poly-MOT을 바탕으로 Fast-Poly는 3D 공간에서 객체의 회전 비등방성을 처리하고, 국소 계산 밀도를 향상시키며, 병렬화 기술을 활용하여 추론 속도와 정밀도를 개선합니다. Fast-Poly는 Python 구현을 통해 두 개의 대규모 추적 벤치마크에서 광범위하게 테스트되었습니다. nuScenes 데이터셋에서 Fast-Poly는 모든 방법 중 최고 성능(75.8% AMOTA)을 달성하며 개인용 CPU에서 34.2 FPS로 실행할 수 있습니다. Waymo 데이터셋에서는 63.6% MOTA의 경쟁력 있는 정확성과 뛰어난 추론 속도(35.5 FPS)를 보여줍니다. 소스 코드는 https://github.com/lixiaoyu2000/FastPoly에서 공개적으로 이용 가능합니다.