3달 전
R-Pred: 튜브-쿼리 어텐션 기반 궤적 정밀화를 통한 이단계 운동 예측
Sehwan Choi, Jungho Kim, Junyong Yun, Jun Won Choi
초록
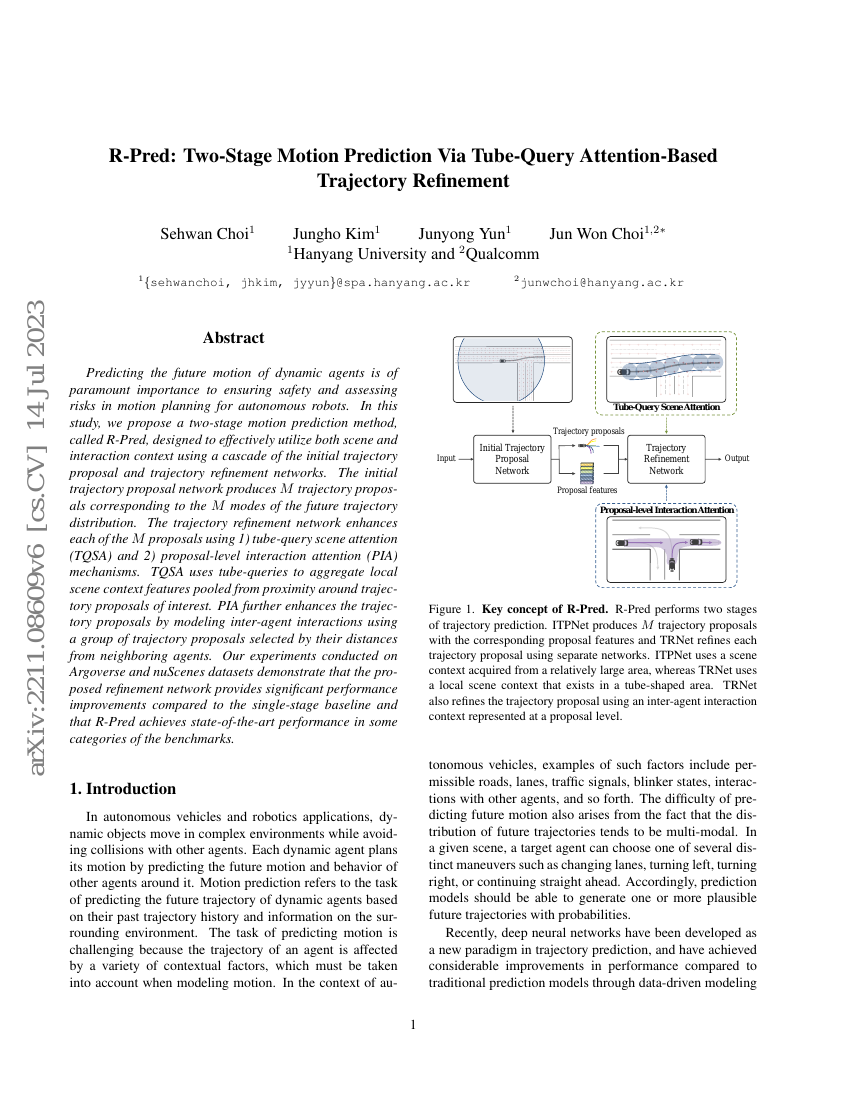
동적 에이전트의 향후 운동을 예측하는 것은 자율 로봇의 운동 계획에서 안전성 확보 및 위험 평가에 있어 핵심적인 과제이다. 본 연구에서는 초기 궤적 제안 네트워크와 궤적 보정 네트워크를 계단식으로 구성하여 장면 및 상호작용 맥락을 효과적으로 활용할 수 있도록 설계된 이단계 예측 방법인 R-Pred를 제안한다. 초기 궤적 제안 네트워크는 향후 궤적 분포의 M개 모드에 해당하는 M개의 궤적 제안을 생성한다. 궤적 보정 네트워크는 1) 튜브-쿼리 장면 주의 메커니즘(TQSA)과 2) 제안 수준의 상호작용 주의 메커니즘(PIA)을 사용하여 각각의 M개 제안을 개선한다. TQSA는 관심 있는 궤적 제안 주변의 근접 영역에서 추출한 국소적 장면 맥락 특징을 튜브-쿼리를 통해 집계한다. PIA는 이웃 에이전트와의 거리 기반으로 선택된 궤적 제안 집단을 이용해 에이전트 간 상호작용을 모델링함으로써 궤적 제안을 추가로 개선한다. Argoverse 및 nuScenes 데이터셋을 대상으로 수행한 실험 결과, 제안한 보정 네트워크는 단일 단계 기준선 대비 유의미한 성능 향상을 보였으며, R-Pred는 벤치마크의 일부 카테고리에서 최신 기술 수준(SOTA)의 성능을 달성하였다.