3달 전
PP-YOLOE-R: 효율적인 앵커리스 회전 객체 탐지기
Xinxin Wang, Guanzhong Wang, Qingqing Dang, Yi Liu, Xiaoguang Hu, Dianhai Yu
초록
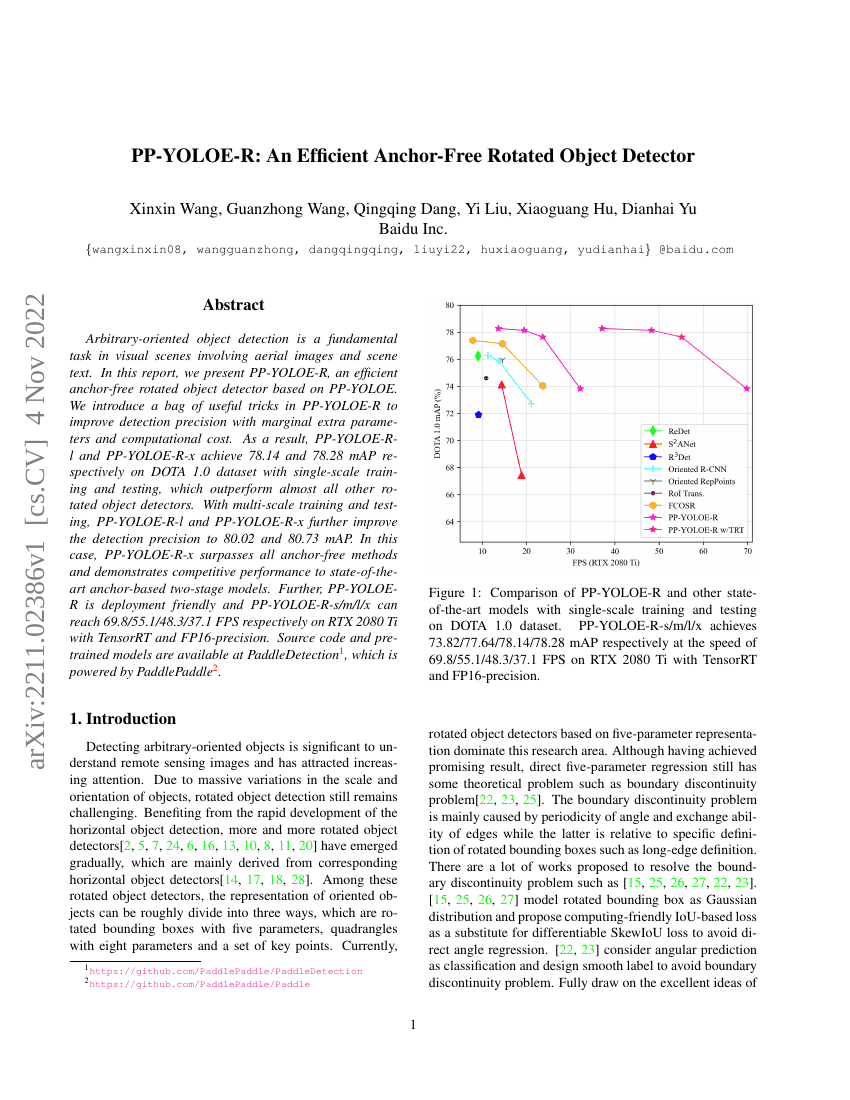
임의 방향 객체 탐지는 항공 이미지 및 장면 텍스트를 포함한 시각적 장면에서 핵심적인 과제이다. 본 보고서에서는 PP-YOLOE 기반의 효율적인 앵커 프리 회전 객체 탐지기인 PP-YOLOE-R를 제안한다. PP-YOLOE-R는 추가적인 파라미터와 계산 비용을 거의 증가시키지 않으면서 탐지 정확도를 향상시키기 위해 여러 유용한 기술들을 도입하였다. 그 결과, 단일 스케일 훈련 및 테스트 조건에서 PP-YOLOE-R-l과 PP-YOLOE-R-x는 DOTA 1.0 데이터셋에서 각각 78.14 및 78.28 mAP의 성능을 달성하였으며, 이는 거의 모든 다른 회전 객체 탐지기보다 뛰어난 성능이다. 다중 스케일 훈련 및 테스트를 적용한 경우, PP-YOLOE-R-l과 PP-YOLOE-R-x의 탐지 정확도는 각각 80.02 및 80.73 mAP로 더욱 향상된다. 이 경우 PP-YOLOE-R-x는 모든 앵커 프리 방법을 능가하며, 최신의 앵커 기반 이단계 모델들과 경쟁 가능한 성능을 보여준다. 또한 PP-YOLOE-R는 배포에 용이하며, TensorRT와 FP16 정밀도를 사용하여 RTX 2080 Ti에서 각각 69.8, 55.1, 48.3, 37.1 FPS의 추론 속도를 달성할 수 있다. 소스 코드 및 사전 학습 모델은 https://github.com/PaddlePaddle/PaddleDetection에서 제공되며, 이는 https://github.com/PaddlePaddle/Paddle에 의해 지원된다.