초록
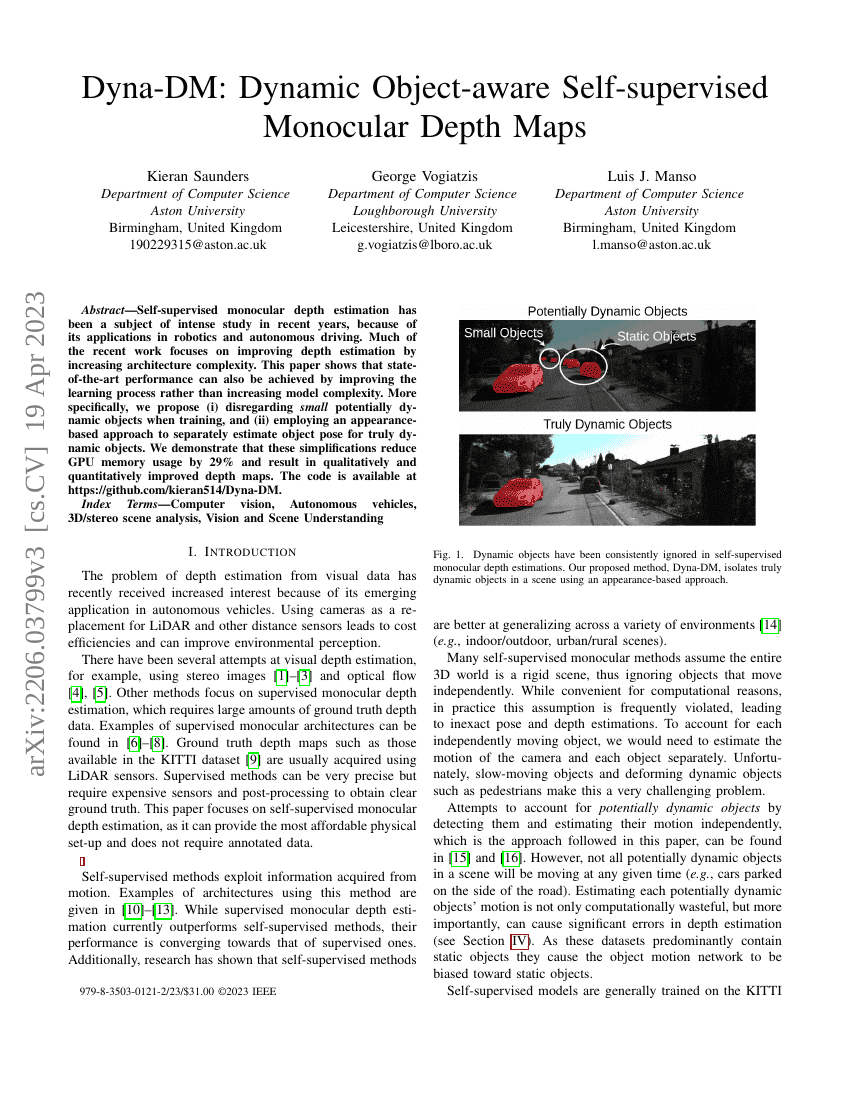
최근 몇 년간 자기지도 단안 깊이 추정(self-supervised monocular depth estimation)은 로봇공학 및 자율주행 분야에서의 응용 가능성으로 인해 집중적인 연구 대상이 되어왔다. 최근의 많은 연구는 모델 구조의 복잡성 증가를 통해 깊이 추정 성능을 향상시키는 데 초점을 맞추고 있다. 본 논문은 모델 복잡성을 증가시키는 대신 학습 과정을 개선함으로써 최신 기술 수준의 성능을 달성할 수 있음을 보여준다. 구체적으로, (i) 학습 시 소규모의 잠재적으로 동적일 수 있는 객체를 무시하고, (ii) 진정한 동적 객체에 대해 외관 기반 접근법(appearance-based approach)을 활용하여 개별적으로 객체 자세를 추정하는 방법을 제안한다. 실험을 통해 이러한 단순화가 GPU 메모리 사용량을 29% 감소시키며, 정성적·정량적으로 개선된 깊이 맵을 얻을 수 있음을 입증하였다. 코드는 https://github.com/kieran514/Dyna-DM 에서 공개되어 있다.