초록
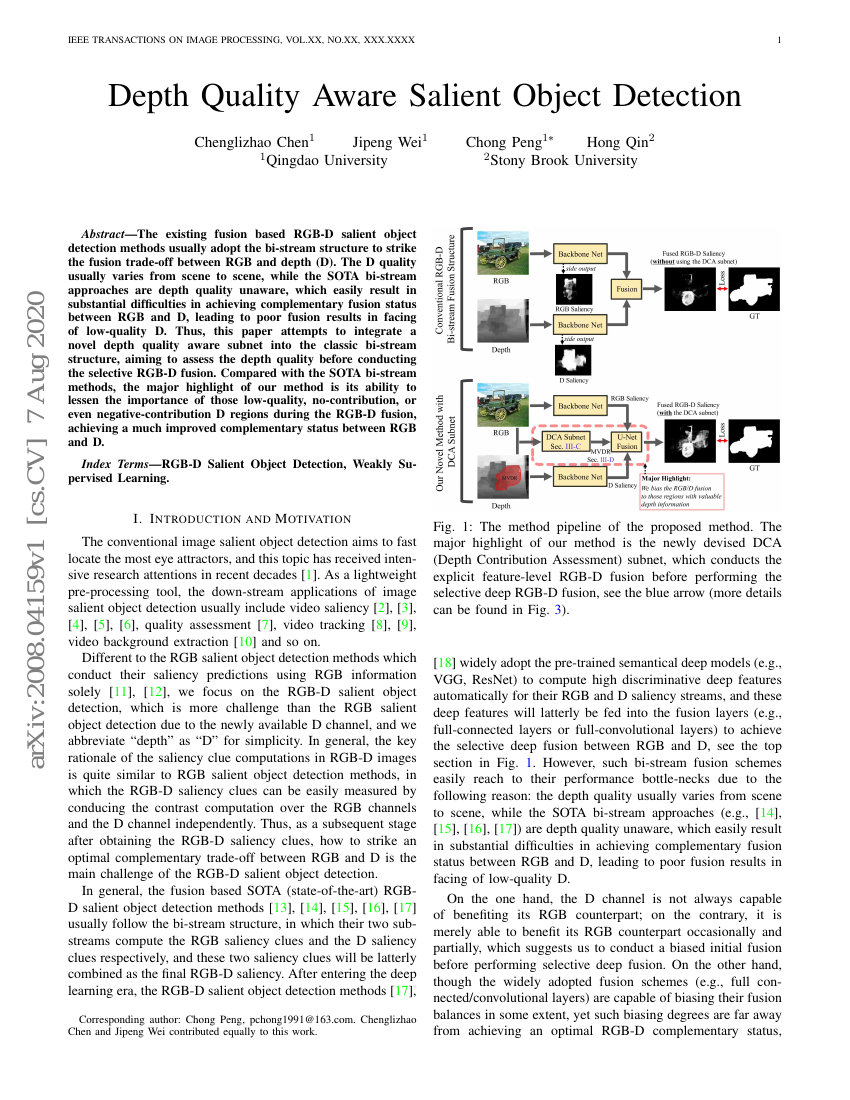
기존의 RGB-D 주요 객체 검출 방법은 일반적으로 RGB와 깊이(D) 간의 융합 균형을 맞추기 위해 양스트림 구조를 채택합니다. D의 품질은 장면에 따라 다르게 변하지만, 최신 양스트림 접근 방식은 D 품질을 인식하지 못하여, RGB와 D 간의 보완적 융합 상태를 달성하는 데 큰 어려움을 초래할 수 있으며, 저품질 D를 대상으로 할 때 빈번한 융합 결과 저하를 초래합니다. 따라서 본 논문에서는 전통적인 양스트림 구조에 새로운 D 품질 인식 서브네트워크를 통합하여, 선택적 RGB-D 융합을 수행하기 전에 D 품질을 평가하는 것을 목표로 합니다. 최신 양스트림 방법들과 비교할 때, 우리 방법의 주요 특징은 저품질, 기여도가 낮거나 심지어 부정적인 기여를 하는 D 영역들의 중요성을 RGB-D 융합 과정에서 줄이는 능력으로, 이는 RGB와 D 간의 보완적 상태를 크게 개선시킵니다.