Command Palette
Search for a command to run...
두 발로 걷는 로봇은 1km당 9분 18초의 속도로 5km를 조깅했습니다.
설명: 오리건 주립 대학의 캐시는 5km 조깅을 53분 만에 완주하여 두 발로 걷는 로봇의 새로운 기록을 세웠습니다.
최근 미국 오리건 주립 대학의 유명 로봇 연구팀인 애질리티 로보틱스가 개발한 두 발로 걷는 로봇 캐시(Cassie)가 5km를 조깅하는 데 53분이 걸려 많은 사람들의 관심을 끌었습니다.
속도는 사람과 비슷하며 5km를 충전할 필요가 없습니다.
연구팀인 Agility Robotics는 5km 달리기의 과정과 하이라이트를 기록한 영상을 공개했습니다.

영상 속의 캐시는 타조와 비슷해 보이고, 관절 움직임이 민첩하고 속도가 일정합니다.
Agility Robotics의 창립자이자 오리건 주립 대학의 교수인 조나단 허스트는 다음과 같이 말했습니다. 캐시는 충전 없이 5km 달리기를 완주했고, 적응을 위해 두 번만 멈췄습니다. 한 번은 과열 때문이고, 다른 한 번은 커브에서 과속했기 때문인데, 6분 30초가 걸렸습니다.
즉, 6분 30초의 다운타임 조정을 제외하면, 캐시는 5km 조깅을 약 46분 30초에 완주했으며, 속도는 9분 18초/km였습니다.

팀에 따르면, 캐시는 "실외에서 달리기 걸음걸이를 제어하기 위해 머신 러닝을 사용하는" 최초의 두 발로 걷는 로봇입니다.
연구팀은 최근 연구를 바탕으로 "Sim-to-Real 강화 학습을 통한 맹목적인 이족보행 계단 횡단"이라는 논문을 완성했고, 이 논문은 올해의 로봇공학: 과학과 시스템(RSS) 컨퍼런스에 선정되었습니다.

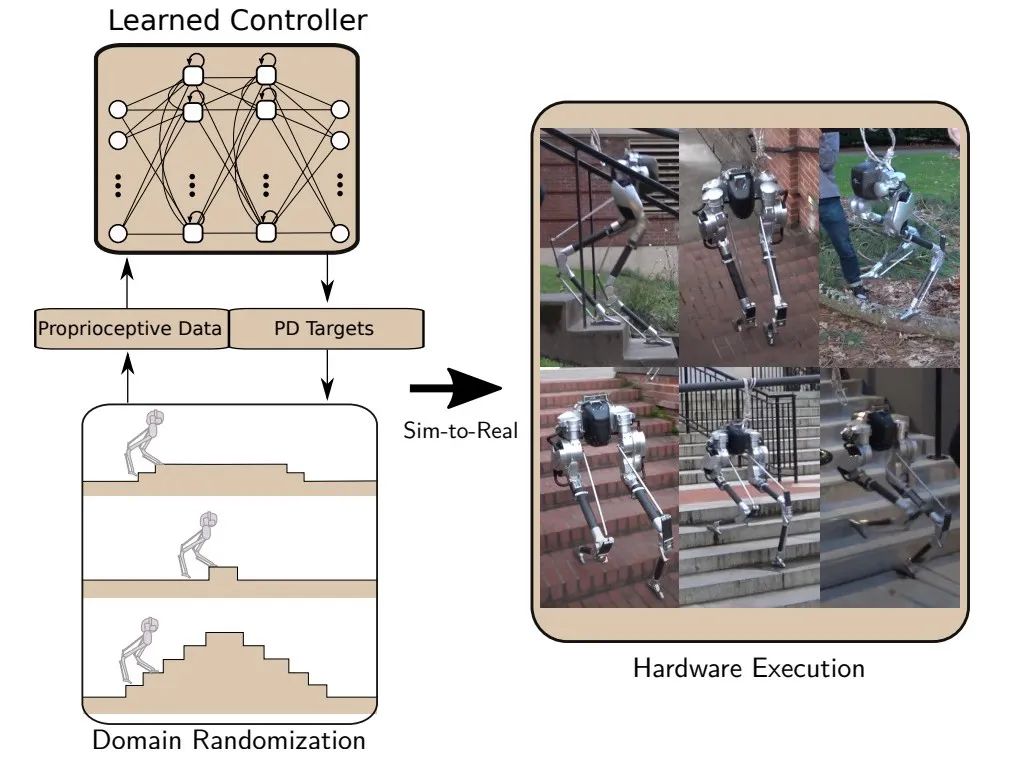
강화 학습을 통해 두 발로 걷는 로봇은 다양한 높이에서 지면의 변화를 시뮬레이션하고 적응하도록 훈련될 수 있습니다. 게다가 기존의 평지 강화 학습 프레임워크를 약간만 변경하면 계단, 고르지 않은 지면 및 기타 시나리오에서 안정적으로 걸을 수 있습니다.
조깅이나 계단을 오르는 장면이든, 캐시는 시각적 입력 없이 동작 계산을 위해 전적으로 하지의 운동 에너지 전도에 의존한다는 점을 언급할 가치가 있습니다.
두 발로 걷는 로봇, 인간과 더 비슷해
익숙한 네 발 달린 로봇, 인터넷에서 유명한 보스턴 다이내믹스 로봇 강아지는 지난 몇 년 동안 달리기, 점프, 계단 오르내리기, 심지어 줄넘기와 춤추기까지 하는 사용 시나리오를 성공적으로 찾아냈습니다.
하지만 종종 동물처럼 보이도록 설계된 네 발 로봇과 비교하면, 두 발 로봇은 겉모습이 인간과 더 비슷하고 기능도 인간에 더 가깝습니다.

사람은 뇌를 통해 명령을 보내어 걷고, 뇌가 각 관절을 움직여 움직임을 완료합니다. 두 발로 걷는 로봇은 로봇의 걷기와 안정성을 지원하기 위해 인간의 엉덩이와 발을 시뮬레이션해야 합니다. 로봇의 동적 특성을 완전히 이해해야만 로봇을 효율적이고 복잡한 동작으로 구동할 수 있습니다.
캐시 로봇 시리즈의 역학은 새, 특히 타조의 걸음걸이에 기반을 두고 있습니다. 캐시의 엉덩이는 여러 가지 자유로운 각도로 디자인되었지만, 무릎은 한 방향으로만 구부릴 수 있습니다. 발목은 유연하면서도 튼튼하게 설계되었습니다. 전반적인 모양은 매우 가볍고, 사람이 걷는 방식과 비슷하게 비교적 자연스러운 방식으로 진동을 줄일 수 있습니다.
오리건 대학의 동적 로봇 연구실에 소속된 Agility Robotics 팀은 로봇 분야에서 오랫동안 명성을 쌓아 왔습니다.그들은 2017년부터 2족 보행 로봇인 캐시 시리즈를 개발하기 시작했으며, 여러 버전을 거친 후 지금까지 많은 성과를 거두었습니다. 그들은 최근 DARPA로부터 100만 달러의 연구 자금을 지원받았습니다.
이 팀은 충전 없이 5km를 달리는 데 성공하면서 큰 자신감을 얻었으며, 앞으로도 Cassie의 기술을 물류, 유통 등의 응용 분야에 적용하기 위해 계속해서 혁신하고 개선해 나갈 것이라고 밝혔습니다.
원천:
– 오리건 주립대학교 공식 웹사이트: 오리건 주립대학교에서 개발한 이족보행 로봇, 달리기 학습으로 역사에 기록되다, 5km 달리기 완주
– YouTube 동영상 "OSU 2족 보행 로봇, 5km 달리기 최초 성공"
– 참고문헌
