Command Palette
Search for a command to run...
Gradslam(∇SLAM) 오픈소스: 논문과 코드 모두 공개

∇SLAM은 몬트리올과 카네기 멜론 대학의 팀이 ICRA 2020에 발표한 논문에서 제안한 기술로, 현재 SLAM 시스템이 일반적으로 직면하고 있는 미해결 문제를 해결합니다.
최근 2년 동안 자율주행, 드론 등 지능형 기기가 급속히 발전하면서 이를 뒷받침하는 핵심 기술인 SLAM(Simultaneous Localization And Mapping)도 유명해졌습니다.
SLAM은 30년 이상의 역사를 가지고 있습니다. 이는 기계가 상태를 인식하고 추정하고 알려지지 않은 환경에서 자율적인 작업을 수행하는 데 필요한 핵심 기술입니다.기계는 경로 계획, 탐색 등의 작업을 수행해야 하며, AR과 VR은 안정적인 3차원 공간을 구축해야 합니다. 이러한 기술은 모두 SLAM의 도움에 의존합니다.
간단히 말해서 SLAM은 두 가지 질문에 답합니다."나는 어디에 있나요?" 그리고 "내 주변에는 무엇이 있나요?"
예를 들어, 청소 로봇은 라이더나 카메라를 SLAM 기술과 결합하여 방의 모든 구석의 배치를 명확하게 이해하고, 이 정보를 바탕으로 청소 경로를 계획하는 환경 지도를 구축합니다.

그러나 수년간의 개발에도 불구하고 기존 SLAM 알고리즘은 여전히 종단 간 미분 불가능성이라는 문제에 직면해 있습니다. ICRA 2020에서 몬트리올 대학교와 카네기 멜론 대학교의 팀이 발표한 논문에서는 이 문제에 대한 해결책을 제안했습니다.
∇SLAM은 기존 SLAM 알고리즘의 병목 현상을 해결합니다.
현재, 고전적인 SLAM 알고리즘으로는 Kinect-Fusion, PointFusion, ICP-SLAM 등이 있습니다.그러나 이러한 방법의 많은 구성 요소가 미분 불가능하기 때문에 SLAM을 위한 표현 학습은 항상 해결되지 않은 문제였습니다. 이는 SLAM 개발을 방해하는 병목 현상이 되기도 했습니다.
이러한 문제를 해결하기 위해 많은 연구자들이 딥러닝을 사용하기 시작했습니다. 그러나 이러한 연구의 대부분은 가상 데이터 세트나 특정 환경에 국한되어 있으며, 정확성을 위해 효율성을 희생하기도 합니다. 그러므로 실용적이지 않습니다.
올해 5월 로봇공학 및 인공지능 분야의 중요한 학술대회인 ICRA 2020(국제로봇 및 자동화 학술대회)에서 몬트리올대학교와 카네기멜론대학교 연구팀은 논문을 발표했습니다."∇SLAM: Dense SLAM과 Automatic Differentiation의 만남", 위 문제에 대한 해결책이 제안되었습니다.
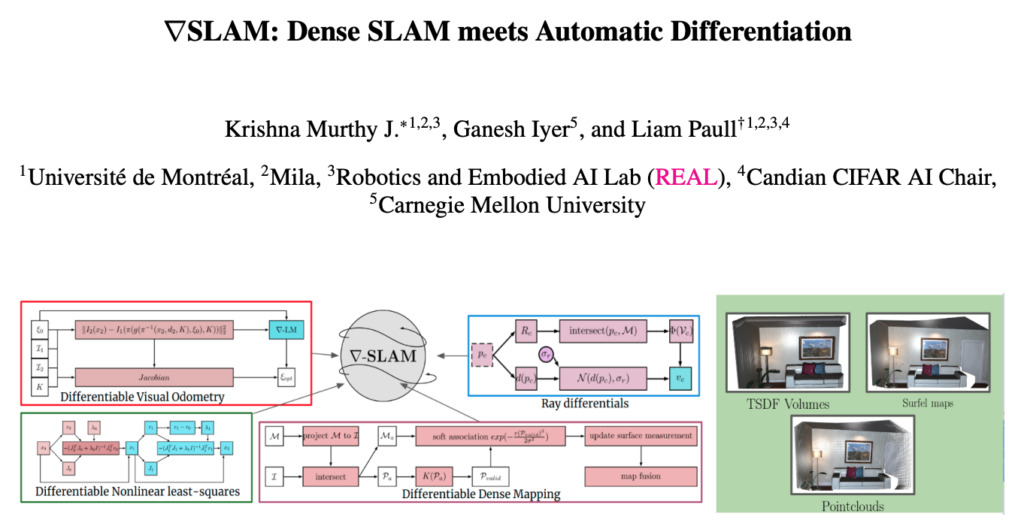
저자는 최적화 문제나 레이캐스트 문제와 같은 SLAM의 고밀도 매핑 시스템에는 미분 불가능한 단위가 많기 때문에 그래디언트 기반 방법이 SLAM에서 그다지 성공적이지 못하다고 지적합니다.
이에 대해 저자들은 논문에서 SLAM에 대한 미분 가능한 계산 그래프인 gradslam(∇SLAM)을 제안했습니다. 계산 그래프의 자동 미분 기능을 사용하여, GradSlam(∇SLAM)은 각 구성 요소 또는 전체 시스템 간에 그래디언트 기반 학습을 허용합니다.

완전히 미분 가능한 SLAM 시스템은 작업 성과를 나타내는 오차 신호를 SLAM 시스템을 통해 원시 센서 관찰 데이터로 역전파할 수 있으므로 작업 중심 표현 학습이 가능합니다.
그 결과, 팀은 미분 가능한 신뢰 영역 최적화 프로그램, 표면 측정 및 융합 방식, 그리고 성능을 저하시키지 않고도 광선에 대한 미분을 설계했습니다.고밀도 SLAM과 계산 그래픽의 융합을 통해 3D 맵에서 2D 픽셀로 되돌아가는 작업이 가능해져 그래디언트 기반 SLAM 학습에 대한 새로운 가능성이 열립니다.
저자들은 gradslam(∇SLAM) 프레임워크가 매우 일반화 가능하며 기존의 SLAM 시스템으로 확장하여 미분할 수 있다고 말합니다.
미분 가능한 방법으로 3D 재구성이 더욱 향상됩니다.
연구팀은 전형적인 SLAM 방법인 ICP-Odometry, ICP-SLAM, Kinect-Fusion, PointFusion을 미분 가능한 계산 그래프로 구현하고, 각 방법과 미분 불가능한 대응 방법을 비교 분석했습니다.
결과는 다음과 같습니다.ICP-Odometry와 ICP-SLAM 매핑에서 좋은 성능을 보이며, 절대 궤적 오차와 상대 포즈 오차가 모두 낮은 수준입니다.다음 표에서 볼 수 있듯이:

프로젝트의 공식 주소:
https://github.com/gradslam/gradslam, 직접 사용해보고 gradslam(∇SLAM) 솔루션의 장점을 경험해 보세요.
Github 외에도 운영하기 쉬운 국내 서비스도 찾았습니다. 컴퓨팅 파워 컨테이너 서비스 플랫폼 OpenBayes는 JupyterNotebook에서 직접 실행할 수 있는 모델 학습을 위한 튜토리얼도 출시했습니다.
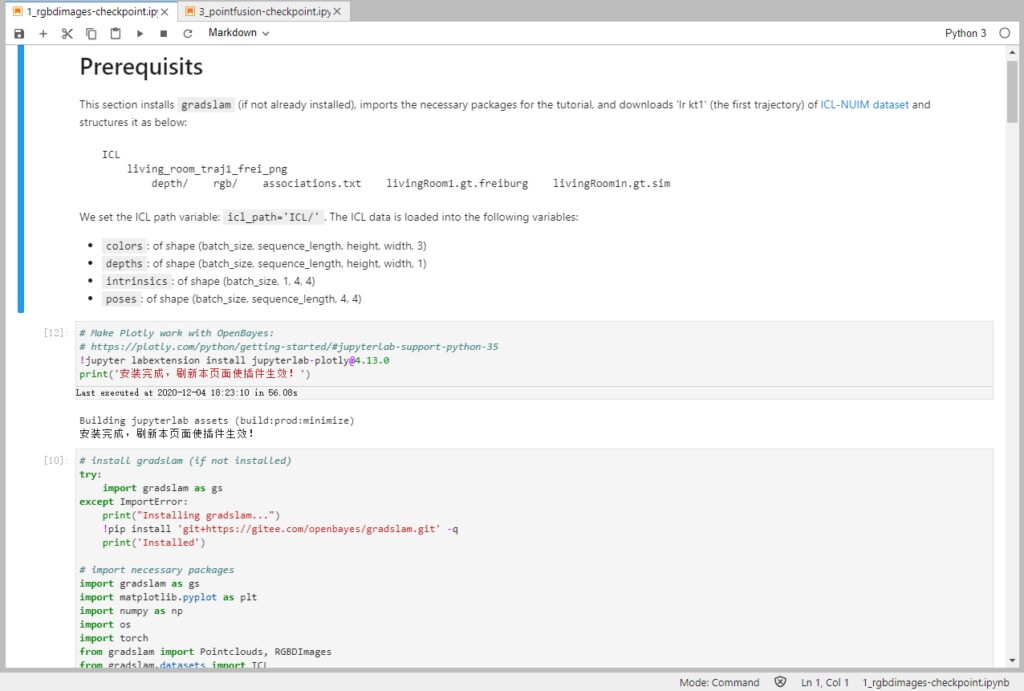
그냥 필요해요입장 오픈베이즈닷컴 등록하면 CPU, NVIDIA T4, NVIDIA Tesla V100 등 다양한 컴퓨팅 파워 리소스를 얻을 수 있습니다. 현재 내부 테스트 기간 동안 매주 무료 컴퓨팅 파워 할당량이 귀하의 계정에 제공됩니다.
OpenBayes는 다양한 컴퓨팅 파워 컨테이너를 제공하는 것 외에도 많은 인기 있는 프로젝트를 위한 공개 데이터 세트, 사전 학습된 모델, Jupyter Notebooks를 제공하며, 이는 간편한 작동을 위해 한 번의 클릭으로 실행할 수 있습니다.
등록 지침
- openbayes.com을 방문하세요
- 초대 코드: HyperAI
새로운 사용자로 등록하여 받으세요
- 사용 가능한 CPU 할당량:주당 300분
- 무료 vGPU 할당량:주당 180분
Gradslam(∇SLAM) 작업 지침
- 오픈베이즈 등록 후
- 콘솔에 접속하기 - 공개 튜토리얼
SLAM 기술은 시각 분야에서 공간 위치 지정 기술의 최첨단 방향으로 업계에서 인정받고 있습니다. 드론부터 무인 주행, 청소 로봇부터 VR/AR 분야까지 SLAM은 이러한 인기 있는 분야에서 볼 수 있습니다.
그러니 여러분도 SLAM 분야의 최신 과학 연구 결과를 알고 싶으시다면, 이번 주말에 gradslam (∇SLAM) 프로젝트를 공부해보시는 게 어떨까요?
서류 주소:
프로젝트 GitHub 주소:
https://github.com/gradslam/gradslam
Gradslam (∇SLAM) Jupyter Notebook 주소:
https://openbayes.com/console/openbayes/containers/HoveymNsfrT