Command Palette
Search for a command to run...
OmniRetarget 글로벌 로봇 모션 리매핑 데이터 세트
*이 데이터 세트는 온라인 사용을 지원합니다.여기를 클릭하여 이동하세요.
OmniRetarget은 아마존, MIT, 캘리포니아 대학교 버클리 및 기타 기관에서 2025년에 공개한 휴머노이드 로봇의 전신 동작 리매핑을 위한 고품질 궤적 데이터셋입니다. 관련 논문 결과는 다음과 같습니다.OmniRetarget: 인간형 전신 운동 조작 및 장면 상호작용을 위한 상호작용 보존 데이터 생성".
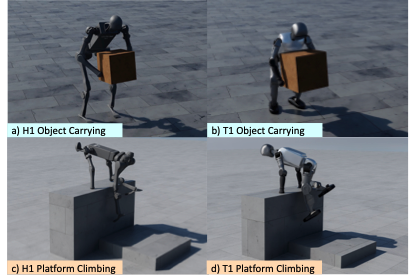
이 데이터셋은 G1 휴머노이드 로봇이 물체 및 복잡한 지형과 상호작용할 때의 동작 궤적을 담고 있으며, 물체 운반, 지형 보행, 그리고 물체-지형 혼합 상호작용의 세 가지 시나리오를 포함합니다. 라이선스 제한으로 인해 공개 데이터셋에는 LAFAN1의 리매핑된 버전이 포함되어 있지 않습니다. 이 데이터셋은 세 개의 하위 세트로 나뉘며, 총 약 4시간 분량의 동작 궤적 데이터를 제공합니다. 구체적인 구성은 다음과 같습니다.
- 로봇-객체: OMOMO 3.0 데이터에서 파생된 객체를 운반하는 로봇의 궤적.
- 로봇 지형: 내부 MoCap으로 생성된 복잡한 지형에서의 로봇 동작 궤적이며, 약 0.5시간 동안 지속됩니다.
- 로봇-객체-지형: 객체와 지형을 모두 포함하는 모션 트랙으로, 길이는 약 0.5시간입니다.
- 또한, 데이터 세트에는 모델 디렉토리가 포함되어 있으며, 이는 학습용이 아닌 표시용으로 URDF, SDF, OBJ 형식의 시각적 모델 파일을 제공합니다.
동작 궤적 데이터는 .npz 형식으로 저장됩니다. 각 궤적에는 프레임 속도(fps)와 시스템 상태(qpos)라는 두 필드가 포함됩니다.