깁슨 환경 인식 데이터 세트
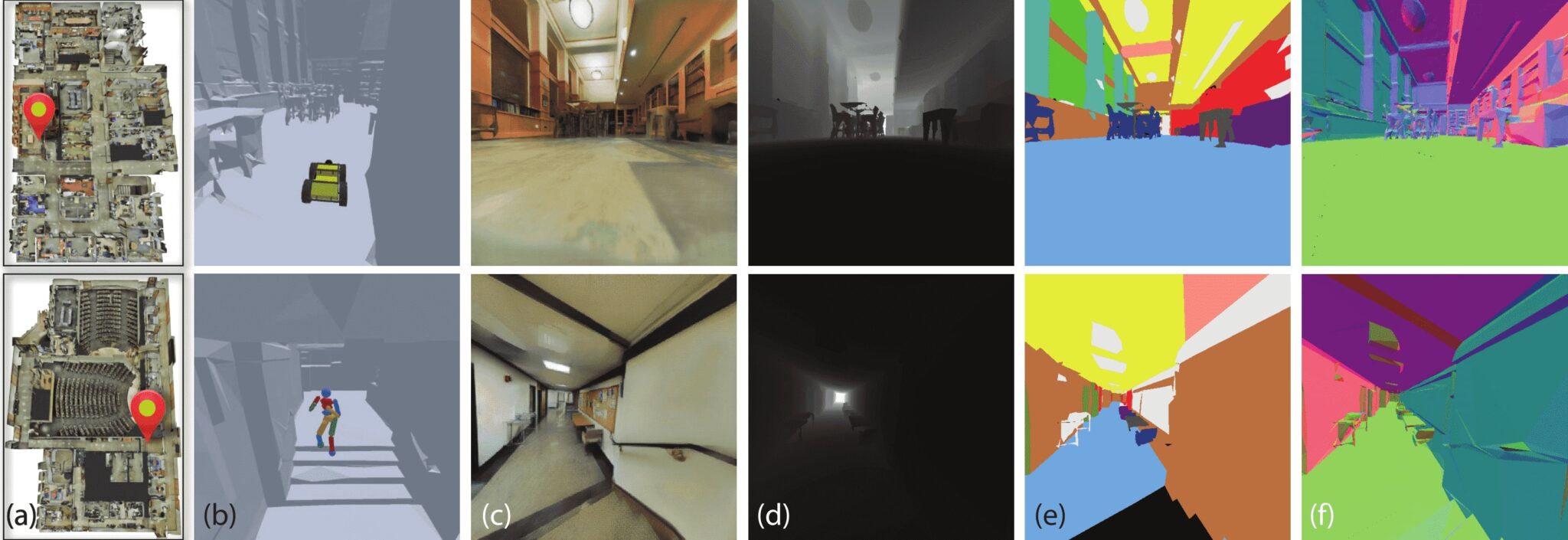
Gibson Environment는 오픈 소스 인식 및 시뮬레이션 데이터 세트입니다. 이 데이터 세트는 로봇의 주도성과 실제 세계에 대한 인식을 탐구하고, 실제 세계에 대한 인식 학습을 수행하는 데 사용됩니다. 데이터 세트는 인위적으로 설계된 공간이 아닌 가상화된 실제 공간을 기반으로 합니다. 이 데이터 세트에는 572개 건물의 1,400개 이상의 바닥 공간이 포함되어 있습니다. 이 데이터 세트의 주요 특징은 다음과 같습니다. I. 실제 세계에서 가져온 것이며 의미적 복잡성을 반영합니다. 2. 훈련된 모델을 추가적인 도메인 적응 없이 실제 세계에 배포할 수 있는 내부 합성 메커니즘인 "고글"을 갖추고 있습니다. 3장. 에이전트를 구현하고 물리적, 공간적 제약을 적용합니다.