Command Palette
Search for a command to run...
L'Université Du Zhejiang Utilise SVM Pour Optimiser Les Capteurs Tactiles Et Le Taux De Reconnaissance Du Braille Atteint 96,12%

La biodétection est un moyen important d’interaction entre les humains et les machines, les humains et l’environnement, et les machines et l’environnement. Parmi eux, le toucher peut permettre une perception environnementale précise et aider les utilisateurs à interagir avec des environnements complexes.
Pour imiter le sens du toucher humain, les chercheurs ont développé divers capteurs pour simuler la perception de l'environnement par la peau. Cependant, la détection tactile a des exigences élevées et des variations de paramètres diverses, nécessitant beaucoup d'expérience en R&D, des recherches bibliographiques suffisantes et un grand nombre d'expériences d'essais et d'erreurs, et le cycle de R&D est très long.
À cette fin, des chercheurs de l’Université du Zhejiang ont utilisé des machines à vecteurs de support pour optimiser les paramètres des capteurs tactiles à nanogénérateur triboélectrique. Le capteur tactile optimisé peut reconnaître plusieurs modèles tactiles et réaliser la reconnaissance Braille. Cette réalisation devrait apporter de nouvelles solutions pour le développement de capteurs tactiles.
Auteur | Xuecai
Rédacteur | Sanyang
Pour imiter le système sensoriel humain, les chercheurs ont développé une série de capteurs semblables à la peau pour surveiller des informations telles que le toucher, la pression, les vibrations, la température et l'humidité. dans,Les capteurs tactiles sont l'élément le plus important pour interagir avec des environnements complexes, a été largement utilisé dans la surveillance de la santé, les robots intelligents, l'interaction homme-ordinateur et la réalité virtuelle/augmentée.
Le capteur idéal doit avoir une sensibilité élevée, une large plage de fonctionnement et une excellente répétabilité. Cela nécessite souvent de sélectionner les paramètres du capteur en fonction de l'expérience en R&D ou de la recherche documentaire, puis de réaliser plusieurs expériences d'essais et d'erreurs, et enfin d'utiliser le capteur optimisé pour effectuer des tâches spécifiques.
Cependant, cette stratégie de conception par anticipation isole la conception et l’application des capteurs, augmente la charge de données, affaiblit les caractéristiques du signal et réduit l’efficacité de l’analyse informatique.
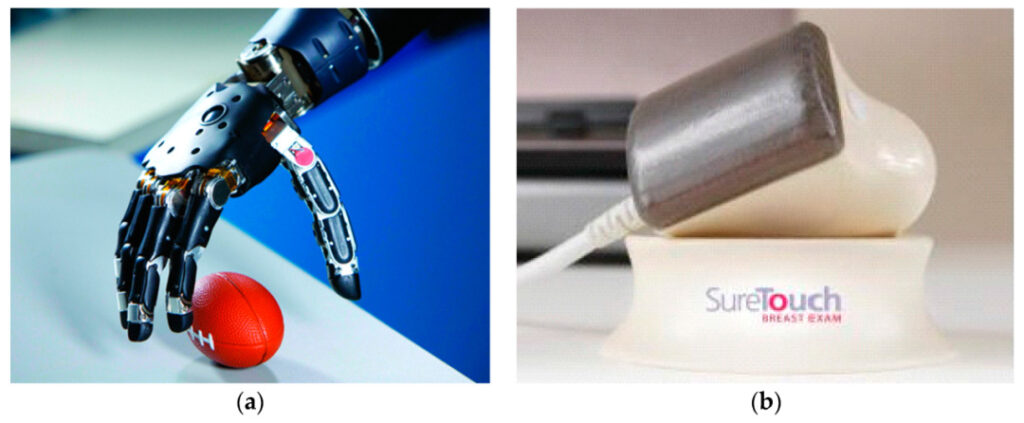
Figure 1 : Prothèse modulaire basée sur des capteurs tactiles (a) et des capteurs d'examen mammaire (b)
Afin d'améliorer la stabilité de la reconnaissance du signal du capteur,Les algorithmes d'apprentissage automatique sont souvent utilisés pour analyser les corrélations et les différences subtiles entre les signaux provenant de différents canaux.. Récemment, l’équipe de recherche de Yang Geng et Xu Kaichen à l’Université du Zhejiang est allée plus loin.La conception du capteur tactile du nanogénérateur triboélectrique (TENG) a été optimisée par une machine à vecteurs de support (SVM). Le capteur optimisé peut identifier avec précision 6 modèles tactiles dynamiques et effectuer une reconnaissance de texte et une reconnaissance Braille en fonction de ceux-ci.. Les résultats pertinents ont été publiés dans « Advanced Science ».

Les résultats connexes ont été publiés dans « Advanced Science »
Lien vers l'article :
https://onlinelibrary.wiley.com/doi/10.1002/advs.202303949
Procédures expérimentales
Aperçu:Paramètres d'optimisation et algorithmes d'optimisation
Les performances des capteurs tactiles basés sur TENG sont principalement liées aux paramètres suivants :Il s'agit notamment du type de signal de sortie, de la densité des électrodes et de la forme et de la distribution de la microstructure de surface, qui sont les paramètres que l'algorithme SVM doit optimiser.
Le capteur sur le doigt peut reconnaître six modèles tactiles, notamment appuyer, tapoter, haut, bas, gauche et droite. L'identification de ces six modèles tactiles constitue la cible de test du capteur et est utilisée pour optimiser les paramètres de conception.
L'algorithme SVM est utilisé pour évaluer la qualité du signal de sortie et sélectionner les paramètres de conception optimaux. Différent du processus de conception traditionnel axé sur l'expérience, le processus de conception SVM fournit une méthode d'optimisation des paramètres basée sur les données qui lie étroitement la conception des appareils et les algorithmes.

Figure 2 : Processus d'optimisation des capteurs tactiles basé sur l'apprentissage automatique
Modèles d'apprentissage automatique:SVM + CNN
Dans cette étude, le classificateur SVM a été obtenu à l’aide de la bibliothèque scikit-learn en Python. Il y a 10 classificateurs au total et le paramètre de régularisation varie de 0,1 à 1,0.
Parallèlement, sur la base du framework PyTorch, un réseau neuronal convolutif unidimensionnel (CNN) a été développé en Python pour l'apprentissage et la reconnaissance des fonctionnalités dans le processus de vérification. Le CNN se compose de cinq couches convolutives suivies d'une fonction de normalisation par lots et d'une unité linéaire rectifiée (ReLU). Le modèle est formé à l'aide de l'algorithme Adaptive Moment Estimation (Adam) avec un taux d'apprentissage de 0,001 et une taille de lot de 128.

Figure 3 : Diagramme du modèle CNN
Processus de production:Écriture directe au laser + encapsulation PDMS
La production du capteur tactile TENG comprend principalement 6 étapes :
1. Fabriquer des électrodes interdigitales grâce à la technologie d’écriture directe par laser infrarouge. L'effet thermique du laser peut induire la carbonisation du film de polyimide (PI) pour obtenir un motif de graphène induit par laser (LIG) ;
2. Enduction centrifuge de polydiméthylsiloxane (PDMS) sur le film LIG/PI ;
3. Une fois que la solution PDMS a pénétré dans la structure poreuse du LIG, le film PI est décollé pour obtenir le film LIG/PDMS ;
4. Traitez le film avec du plasma d'oxygène pour introduire des groupes électronégatifs et éliminer les impuretés sur la surface du film ;
5. Introduire un film de copolymère de perfluoroéthylène propylène (FEP) pour améliorer l'effet triboélectrique du dispositif ;
6. Enfin, encapsulez avec du PDMS et effectuez le modelage au laser.

Figure 4 : Processus de production du capteur tactile TENG
Type de signal de sortie:Courant et tension
Le type de signal de sortie est fortement corrélé aux performances de détection du TENG, les chercheurs ont donc d’abord comparé les effets de la tension de frottement et du courant de frottement sur les performances du capteur.
Tout d’abord, la répétabilité des données de ces deux types de signaux de sortie. La distribution du signal de courant est irrégulière et présente un écart important par rapport aux données moyennes, tandis que les données de tension ne présentent qu'un faible écart par rapport aux données moyennes et sont plus répétables.
De plus, les chercheurs ont utilisé un classificateur SVM linéaire pour classer les données, avec une précision de classification de 94,278% pour les signaux de tension et de 95,579% pour les signaux de courant.La séparabilité et la discrétion des signaux de tension et de courant sont respectivement [3,636, 11,877] et [3,528, 11,267].
Afin d'éliminer l'influence des données de différentes dimensions, les indicateurs ci-dessus sont normalisés, le résultat du signal de tension passe de [94,278%, 3,636, 11,877] à [0, 1, 1], et le résultat du signal de courant passe de [95,579%, 3,528, 11,267] à [1, 0, 0]. Cela montre que le signal de tension a deux critères d'évaluation, lequel est le plus adapté à la sortie du signal.

Figure 5 : Réponse de la tension de sortie et du courant de sortie à 6 modèles tactiles
a&b : réponses des signaux de tension et de courant à 6 modes tactiles respectivement ;
c&d : résultats de réduction de dimensionnalité des signaux de tension et de courant de sortie respectivement.
Densité des électrodes:Clairsemé et dense
La densité des électrodes affecte la complexité du signal. Les chercheurs ont étudié les performances de l’appareil lorsque les électrodes étaient réparties de manière clairsemée et dense. Après réduction de la dimensionnalité du signal, on peut constater que les signaux d’électrodes peu distribués présentent une plus grande discrimination.
La précision de classification, la séparabilité et la discrétion des signaux d'électrodes dispersés sont respectivement [96,975%, 3,695, 14,759] et celles des électrodes densément dispersées sont [95,958%, 3,528, 11,542]. Après normalisation, ils sont respectivement [1, 1, 1] et [0, 0, 0], indiquant qu'il existe trois critères d'évaluation pour les signaux d'électrodes peu dispersés.
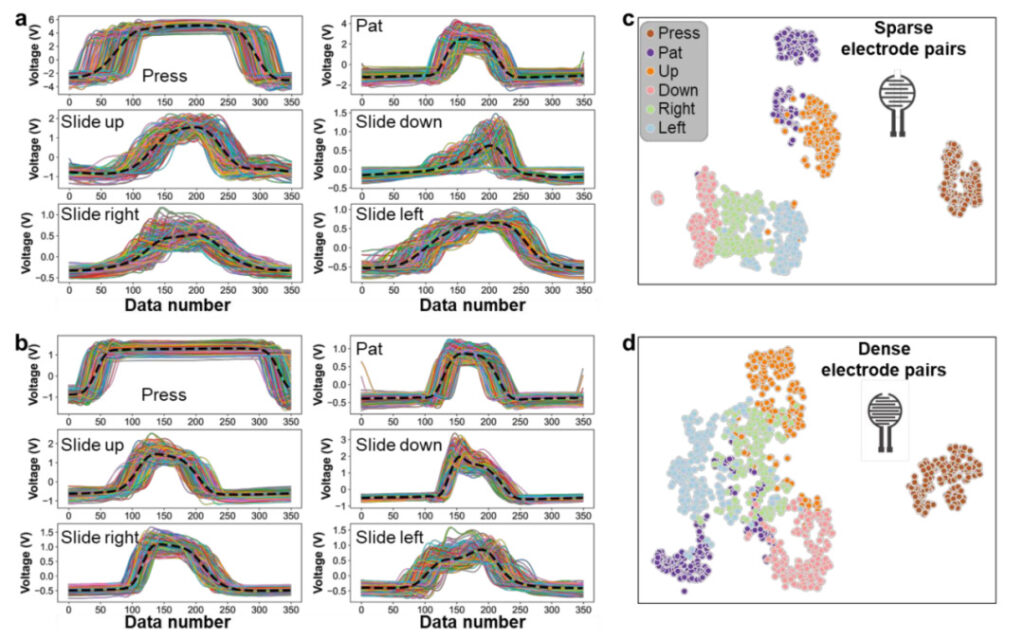
Figure 6 : Réponses du signal des électrodes dispersées et denses à six modèles de toucher
a&b : Réponses du signal des électrodes dispersées et des électrodes densément réparties à 6 modes tactiles respectivement ;
c&d : Résultats de réduction de dimensionnalité des signaux enregistrés respectivement par des électrodes dispersées et des électrodes densément réparties.
Forme de la microstructure:Empreinte digitale et grille
La microstructure rugueuse de la surface PDMS peut réduire l’influence de la viscosité sur le signal et améliorer le rapport signal/bruit.. Les chercheurs ont comparé les effets des microstructures de type empreinte digitale et des microstructures de type grille sur les performances des appareils et ont constaté que les données de la structure de type empreinte digitale étaient plus concentrées, tandis que le signal de la structure de type grille était instable.
La précision, la séparabilité et la discrétion des signaux de structure de type empreinte digitale et de type grille sont respectivement [96,50%, 4,227, 14,958] et [95,056%, 3,725, 11,783]. Après normalisation, ils sont [1, 1, 1] et [0, 0, 0], indiquant que la microstructure de type empreinte digitale est plus adaptée à cette expérience.

Figure 7 : Réponses du signal de la microstructure de type empreinte digitale (a) et de la microstructure de type grille (b) à six modèles tactiles
Distribution de la microstructure:Espacement des canaux
Dans la microstructure de type empreinte digitale, l'espacement entre les canaux adjacents affecte également la qualité du signal.. Les chercheurs ont comparé les performances des dispositifs avec un espacement des canaux de 100, 200 et 300 µm. Les indicateurs normalisés des trois étaient respectivement [1, 0,902, 1], [0,042, 1, 0] et [0, 0, 0,228], indiquant que plus l'espacement est petit, plus il est propice à la sortie du signal.
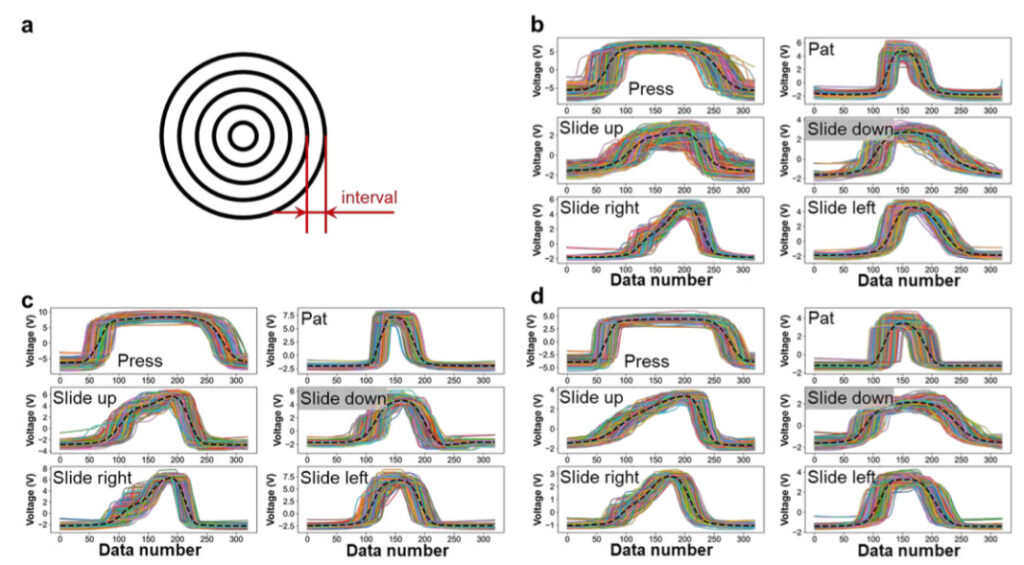
Figure 8 : Réponses du signal de différents espacements de canaux à 6 modes tactiles
a : Schéma de l'espacement des canaux de la microstructure en forme d'empreinte digitale ;
b&c&d : Réponses du signal lorsque l'espacement des canaux est respectivement de 300 µm, 200 µm et 100 µm.
Les paramètres de l'appareil obtenus par optimisation SVM sont résumés comme suit :

Tableau 1 : Résumé des paramètres et des résultats d'optimisation SVM
Vérification expérimentale:Reconnaissance de texte
Grâce aux paramètres optimisés par l'algorithme SVM, le capteur tactile TENG peut identifier avec précision 6 modèles tactiles. Par conséquent, en mode de mesure de tension,Les capteurs tactiles TENG peuvent distinguer différentes lettres et ainsi réaliser la reconnaissance de texte.
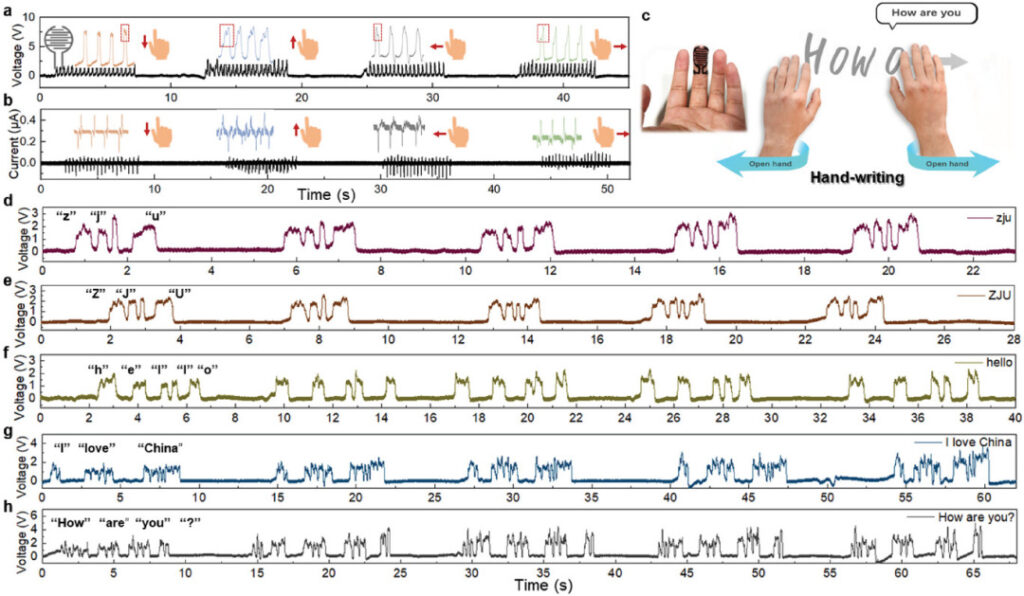
Figure 9 : Application du capteur tactile TENG à la reconnaissance de texte
a&b : tension et courant de sortie lors du glissement vers le haut, le bas, la gauche et la droite respectivement ;
c : Schéma du processus de reconnaissance de texte par le toucher ;
dh : Signaux de réponse du capteur tactile TENG à différentes phrases.
Vérification bionique:Reconnaissance du braille
Pour imiter les caractéristiques tactiles de la peau humaine, le capteur tactile TENG mentionné ci-dessus a été fixé sur une main de robot pour des tests de reconnaissance Braille. Tout d’abord, les signaux tactiles de 10 chiffres Braille sont collectés par la main robotique. Ensuite, le signal faible pendant le processus de glissement est extrait grâce à un filtrage passe-haut.

Figure 10 : Signaux tactiles de 10 chiffres Braille (à gauche) et distribution de réduction de dimensionnalité (à droite)
Ces numéros Braille présentent un degré élevé de similitude et sont difficiles à reconnaître. À cette fin, les chercheurs ont utilisé le CNN pour l’apprentissage et la classification des caractéristiques. La précision de classification du CNN est de 96,12%, uniquement pour les trois chiffres Braille 0, 3 et 8 présentant une grande similarité, la précision est faible.
Pour vérifier sa faisabilité dans des applications pratiques, les chercheurs ont utilisé un bras robotisé pour effectuer la reconnaissance en temps réel de numéros de téléphone en braille à 11 chiffres. Après avoir imprimé un ensemble de numéros de téléphone en braille, la main robotique est capable de reconnaître chaque chiffre successivement, de fournir un retour en temps réel et de l'afficher sur une interface utilisateur graphique (GUI).

Figure 11 : Capteur tactile TENG pour la reconnaissance en temps réel des numéros de téléphone en braille
Les résultats ci-dessus montrent queLe capteur tactile TENG optimisé par SVM peut reconnaître efficacement le texte par contact, améliore l'interaction entre les machines et l'environnement et devrait fournir de nouvelles solutions pour l'assistance aux personnes handicapées.
Capteur tactile TENG
Les premiers biocapteurs étaient basés sur des réactions immunitaires antigène-anticorps ou des réactions double brin d’ADN.Ces capteurs sont très précis, mais sont principalement utilisés en biologie moléculaire et sont difficiles à utiliser pour la surveillance biologique à grande échelle.
Après que le concept d'« Internet des objets » a été proposé,Les chercheurs commencent à développer des biocapteurs à haut débit, à faible coût et à grande échelle, une série de capteurs environnementaux, notamment des capteurs tactiles, a vu le jour.

Figure 12 : Historique du développement des biocapteurs
Les premiers capteurs tactiles ont été conçus sur la base de la résistance, de la capacité, de la piézoélectricité et des effets thermoélectriques.Ces composants augmenteront considérablement la taille du capteur, limitant son utilisation dans de multiples scénarios..
Après la proposition du TENG en 2012, la recherche et le développement de capteurs tactiles sont entrés dans une nouvelle étape.Les TENG à l'échelle nanométrique peuvent être intégrés dans divers substrats flexibles pour former des capteurs portables, qui à leur tour donnent naissance à des concepts tels que la peau électronique.
Cependant, le développement des capteurs tactiles TENG traditionnels repose principalement sur l'expérience de l'équipe de recherche, la recherche documentaire et de multiples essais et erreurs. maintenant,Avec l'aide de l'IA, la recherche et le développement des capteurs tactiles TENG peuvent passer d'une approche axée sur l'expérience à une approche axée sur l'application, ce qui peut réduire considérablement le cycle et le coût de la R&D, accélérer la mise en œuvre de la R&D, aider les capteurs tactiles TENG à se combiner avec la demande et offrir plus de commodité à la vie des gens.
Liens de référence :
[1]https://www.mdpi.com/1424-8220/17/11/2653
[2]https://onlinelibrary.wiley.com/doi/full/10.1002/adma.202008276








