Command Palette
Search for a command to run...
Analyse d'images Par Drone Et IA : l'Université De Lisbonne Détecte Efficacement Les Ravageurs Forestiers

Contenu en un coup d'œil :La détection précoce des parasites est essentielle pour prendre des mesures de prévention et de contrôle adaptées aux conditions locales. Bien que la technologie de télédétection puisse être utilisée pour scanner rapidement de vastes zones, elle est moins efficace face à des signaux de faible intensité ou à des objets difficiles à détecter. C'est pourquoi des chercheurs de l'Université de Lisbonne ont combiné des drones avec l'analyse d'images par IA et ont testé deux méthodes d'apprentissage en profondeur - FRCNN et YOLO - pour détecter les premiers nids de teignes du pin, avec des résultats significatifs.
Mots-clés:Algorithme d'IA de détection des nuisibles YOLO
Cet article a été publié pour la première fois sur la plateforme publique HyperAI WeChat~
De nos jours, avec le déclin des ressources forestières et la dégradation de l’environnement de plus en plus grave, les ravageurs forestiers sont devenus l’un des principaux défis à la protection des forêts mondiales.Parmi eux, des ravageurs destructeurs tels que la teigne du pin (Thaumetopoea pityocampa) ont attiré une attention considérable.La teigne du pin est principalement répartie dans le sud de l'Europe, en Méditerranée et en Afrique du Nord. Ses larves perceront des trous dans les troncs et les branches des pins et les mangeront, détruisant ainsi la croissance et le développement des pins.
Pour la détection précoce et le contrôle de la teigne du pin, des chercheurs de l'Université de Lisbonne ont comparé deux algorithmes d'apprentissage profond pour relever le défi de l'identification des nids dans l'imagerie par drone.La recherche a été publiée dans la revue NeoBiota sous le titre « Test de détection précoce des nids de la chenille processionnaire du pin Thaumetopoea pityocampa à l'aide de méthodes basées sur des drones ».
Les résultats de la recherche ont été publiés dans NeoBiota
Adresse du document :
https://neobiota.pensoft.net/article/95692/
Aperçu de l'expérience
Par le passé, les chercheurs utilisaient généralement la technologie de télédétection (satellites, etc.) combinée à des caméras multispectrales pour obtenir des images de la couverture forestière dans une certaine zone et évaluer la situation globale des insectes nuisibles en fonction d’informations telles que la couleur de la couronne et l’emplacement des arbres morts. Cependant, en raison de la faible résolution des images, il n’est pas possible de détecter les infestations sur des arbres individuels.C'est pourquoi, dans cette expérience, les chercheurs ont proposé une méthode de collecte d'images par drones. Cela permet au drone de se rapprocher des arbres individuels et de les scanner et de les capturer plus en détail.
Les chercheurs ont utilisé des images capturées par des drones pourDeux méthodes d'apprentissage profond, Faster R-CNN (FRNN) et YOLO, ont été testées pour détecter les premiers nids de la teigne du pin P. (ci-après dénommés nids). Le processus expérimental spécifique est le suivant :
Sélection du site de recherche
Les chercheurs ont sélectionné un site d’étude en France, en Italie et au Portugal.Comme le montre la figure 1, les caractéristiques telles que l’âge et la densité des arbres étaient différentes entre les trois sites.
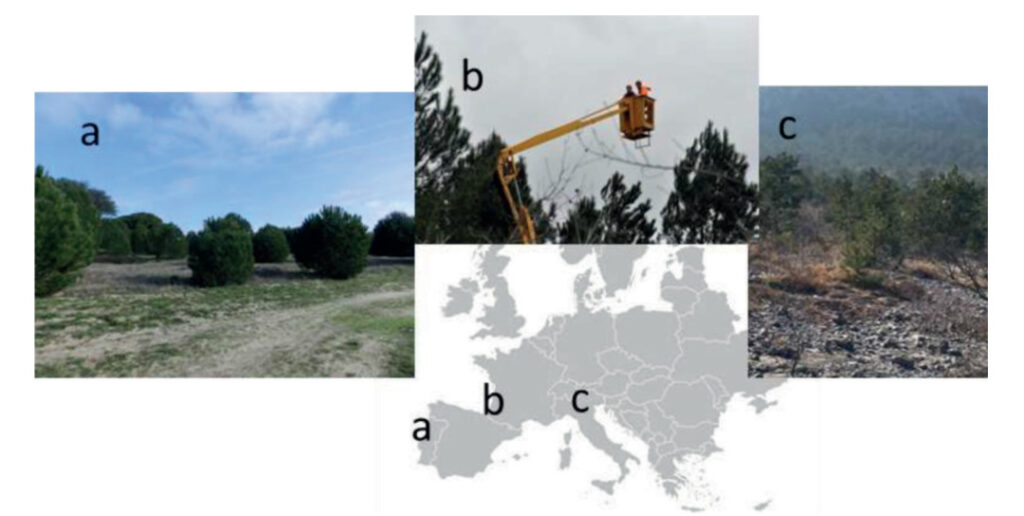
Figure 1 : Lieu de l'étude
a : forêt de pins portugaise
b : Forêt de pins française
c : Forêt de pins noirs d'Italie
Dans les trois sites, les chercheurs ont utilisé des comptages au sol (deux observateurs ont inspecté visuellement les deux côtés des arbres) pour détecter le nombre de nids.De plus, dans la forêt de pins française représentée sur la figure 1b, les chercheurs se sont placés sur une plate-forme mobile à 2 m au-dessus de la canopée des arbres pour détecter le nombre de nids.
Ensemble de données
Les chercheurs ont utilisé des drones et des caméras haute définition pour collecter des images de trois sites d’échantillonnage.La meilleure solution de performance d'application pour les caméras haute définition (HD) (RGB HD SONY Alpha 7R) a été déterminée comme suit : utiliser un capteur RGB HD avec une distance focale de 35 mm et une résolution d'au moins 36 Mpix, tandis que le drone sélectionné était la plate-forme de drone multi-rotor DJI Matrice 300, et le chevauchement dans et à travers la piste du 80% a été formulé.
Au final, les chercheurs ont obtenu 22 904 images collectées par des drones sous forme d'ensemble de données et ont manipulé les images des drones grâce à des techniques d'augmentation des données, telles que la modification de la luminosité, de la teinte, du bruit et de la compression d'image, pour générer un nouvel ensemble de données qui permet au modèle d'apprendre et de mieux généraliser.Parmi eux, 80% de cet ensemble de données sont utilisés pour la formation du modèle et 20% sont utilisés pour les tests..
Procédures expérimentales
Modèle de drone
Considérant que certains nids ne peuvent être vus que de côté, les chercheurs ont utilisé la détection du modèle principalement pour une orthophotographie de drone unique plutôt que pour une orthophotographie globale.,Étant donné que l’image globale est en perspective verticale, il est facile de provoquer des omissions.Les orthophotographies de drones font référence à des images collectées par des drones qui ont été traitées de manière à ce que leur position et leur échelle sur la carte soient cohérentes avec leur position et leur échelle dans le monde réel.
L'équipe de recherche a formé deux modèles d'apprentissage profond basés sur FRCNN et YOLO.Pour évaluer les résultats de détection du modèle sur les images de drones, un observateur a également été chargé d'évaluer visuellement le nombre de nids dans chaque image.
Les chercheurs ont utilisé le score F1 pour mesurer les performances du modèle par rapport à la détection de l’œil humain sur les images de drones et au sol..La formule de calcul du score F1 est la suivante :

Figure 2 : Formule de calcul F1
Le score F1 est la moyenne harmonique de la précision et du rappel et peut être utilisé pour évaluer l'exactitude et l'exhaustivité d'un modèle.Sa plage de valeurs s'étend de 0 à 1, et plus elle est proche de 1, meilleures sont les performances du modèle.
Résultats expérimentaux
Les chercheurs ont comparé les modèles FRCNN et YOLO avec la détection de l’œil humain.La performance du modèle dans la détection de la présence ou de l'absence de nids sur les arbres (arbres infestés %) et du nombre de nids (nombre de nids PPM) a été testée.
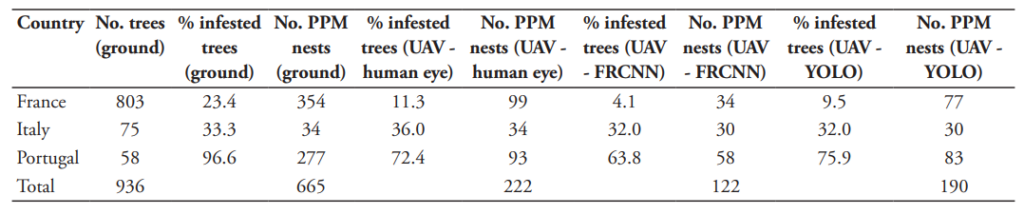
Tableau 1 : Détection des nids de teignes du pin par différentes méthodes
Comme le montre le tableau 1, un total de 665 nids ont été observés visuellement par des yeux humains dans les arbres de toute la zone d’étude grâce au comptage au sol, tandis que 222 nids ont été détectés grâce à l’inspection visuelle des images de drones. Les chercheurs pensent que la différence est due au fait que les observations visuelles au sol ont des angles de vision multidimensionnels, tandis que les drones se limitent à des prises de vue d'en haut.Cependant, les images de drones ont leurs propres avantages, car les inspections détaillées au sol sont coûteuses et les drones peuvent informer les gens des risques et prendre des mesures supplémentaires pour effectuer des inspections détaillées au sol.
La figure ci-dessous montre les scores F1 des deux modèles de détection de la présence de nids et du nombre de nids par arbre sur des images de drones de trois parcelles d'échantillonnage.
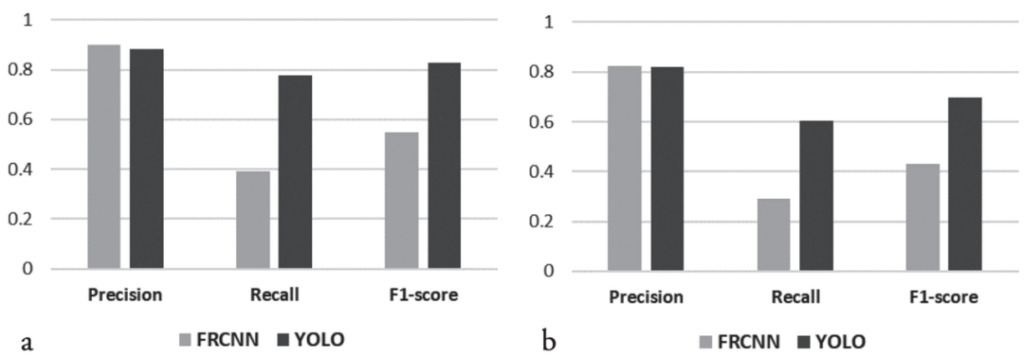
Figure 3 : Scores F1 de deux modèles pour la détection d'images de drones
a : Détecter la présence de nids sur des images de drones
b : Détecter le nombre de nids sur chaque arbre
Comme le montre la figure 3, le score F1 du modèle YOLO pour la détection des nids dans les images de drones est aussi élevé que 0,826, et le score F1 du modèle YOLO pour la détection du nombre de nids sur chaque arbre est aussi élevé que 0,696.Dans le même temps, les chercheurs ont constaté que les performances de détection du modèle YOLO étaient supérieures à celles du FRCNN.La figure ci-dessous montre les scores F1 des deux modèles lors de la détection d'images de drones à différents endroits d'étude (différentes espèces de pins).
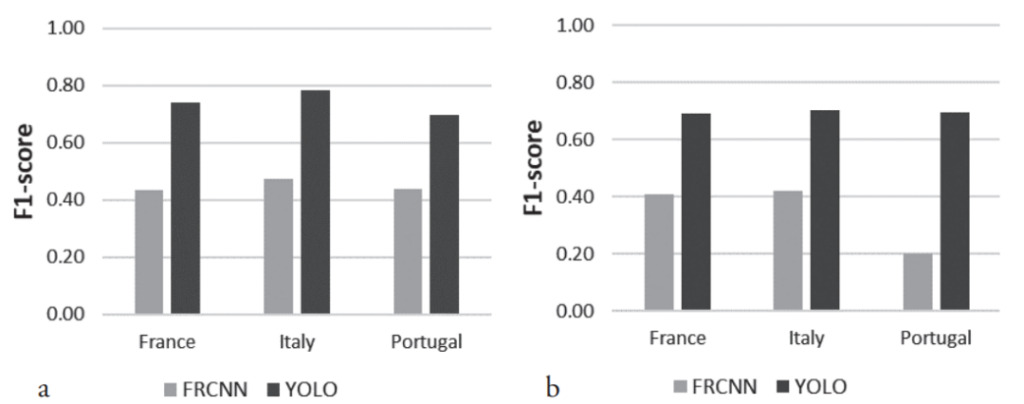
Figure 4 : Scores F1 des deux modèles à différents endroits d'étude
a : Détection de la présence de nids sur des images de drones
b : Détecter le nombre de nids sur chaque arbre
Comme le montre la figure 4, dans les trois tracés, qu'il s'agisse de détecter la présence de nids ou le nombre de nids sur chaque arbre,Le score F1 du modèle YOLO est meilleur que celui du modèle FRCNN.
En résumé, les chercheurs ont proposé queLa combinaison de drones et de modèles d’IA permet de détecter efficacement les nids de teignes du pin à un stade précoce.Parmi eux, les drones présentent les avantages suivants :
- Efficacité:Les drones peuvent couvrir rapidement de vastes zones et collecter de grandes quantités de données.
- Haute précision:Les caméras haute résolution embarquées par les drones peuvent capturer des images et des vidéos très détaillées, permettant aux drones de fournir des données de haute précision.
Le modèle YOLO fonctionne bien à la fois dans la détection de nids et dans la détection de la quantité de nids sur les images de drones.Cela montre que la combinaison de technologies pertinentes est d’une grande importance dans la surveillance et la gestion des ravageurs et des maladies dans les forêts, et fournit également de nouvelles idées pour la protection des écosystèmes forestiers.
Drones + IA : les grandes tendances technologiques
À l’heure actuelle, les drones et l’IA sont devenus un consensus dans le développement de la protection des forêts au pays et à l’étranger.Grâce à la perspective aérienne des drones et à l’analyse de l’intelligence artificielle, les chercheurs peuvent effectuer des tâches de manière plus efficace, plus précise et plus automatique, améliorant ainsi l’efficacité de la protection des forêts.
En se concentrant sur la Chine, le rapport « Surveillance par télédétection des ravageurs et des maladies des forêts - Des satellites aux drones » publié par l'Académie chinoise des sciences détaille les types, les stades de développement et les méthodes de détection des ravageurs et des maladies des forêts., et a proposé que l’une des directions importantes pour les futurs travaux de protection des forêts soit de développer des modèles de prédiction et de parvenir à une intégration transparente des méthodes de prédiction et de détection, ce qui coïncide avec les résultats de recherche de cet article.
Adresse du rapport :
On peut constater que les drones et l’IA ont apporté de nouvelles opportunités et de nouveaux défis à la protection des forêts et ont joué un rôle important dans l’amélioration de l’efficacité et la protection des ressources forestières.Cependant, l’intégration des drones et de l’intelligence artificielle se heurte également à une série de défis.D’une part, il est nécessaire de promouvoir en permanence le développement des drones et de l’intelligence artificielle pour améliorer les performances et la stabilité. D’autre part, en termes de sécurité des données et de protection de la vie privée, des politiques et réglementations pertinentes sont nécessaires pour garantir que les drones et les applications d’intelligence artificielle peuvent traiter et stocker les données en toute sécurité.
Cet article a été publié pour la première fois sur la plateforme publique HyperAI WeChat~