Command Palette
Search for a command to run...
Le Robot Bipède a Effectué Un Jogging De 5 Kilomètres À Un Rythme De 9 Minutes Et 18 Secondes Par kilomètre.
Description : Cassie, de l'université d'État de l'Oregon, a parcouru cinq kilomètres en 53 minutes, établissant ainsi un nouveau record pour les robots bipèdes.
Récemment, le robot bipède Cassie, créé par Agility Robotics, une équipe de recherche en robotique bien connue de l'Université d'État de l'Oregon aux États-Unis, a mis 53 minutes pour effectuer un jogging de 5 kilomètres, ce qui a attiré l'attention de tous.
Le rythme est proche de celui des humains, et pas besoin de charger pendant 5 kilomètres
L'équipe de recherche Agility Robotics a publié une vidéo qui enregistre le processus et les moments forts de la course de cinq kilomètres.

Dans la vidéo, Cassie ressemble à une autruche, avec des mouvements articulaires adroits et un rythme régulier.
Jonathan Hurst, fondateur d'Agility Robotics et professeur à l'Université d'État de l'Oregon, a déclaré : Cassie a parcouru les cinq kilomètres sans recharger sa batterie et ne s'est arrêtée que deux fois pour s'adapter, une fois en raison d'une surchauffe et l'autre en raison d'une vitesse excessive dans un virage, ce qui a pris 6 minutes et demie.
C'est-à-dire, en excluant les 6 minutes et demie de temps d'arrêt de réglage, Cassie a complété le jogging de cinq kilomètres en environ 46:30, avec un rythme de 9m18s/km.

Selon l'équipe, Cassie est le premier robot bipède à « utiliser l'apprentissage automatique pour contrôler la démarche de course dans un lieu extérieur ».
Sur la base de recherches récentes, l'équipe a rédigé l'article « Blind Bipedal Stair Traversal via Sim-to-Real Reinforcement Learning », qui a été sélectionné pour la conférence Robotics: Science and Systems (RSS) de cette année.

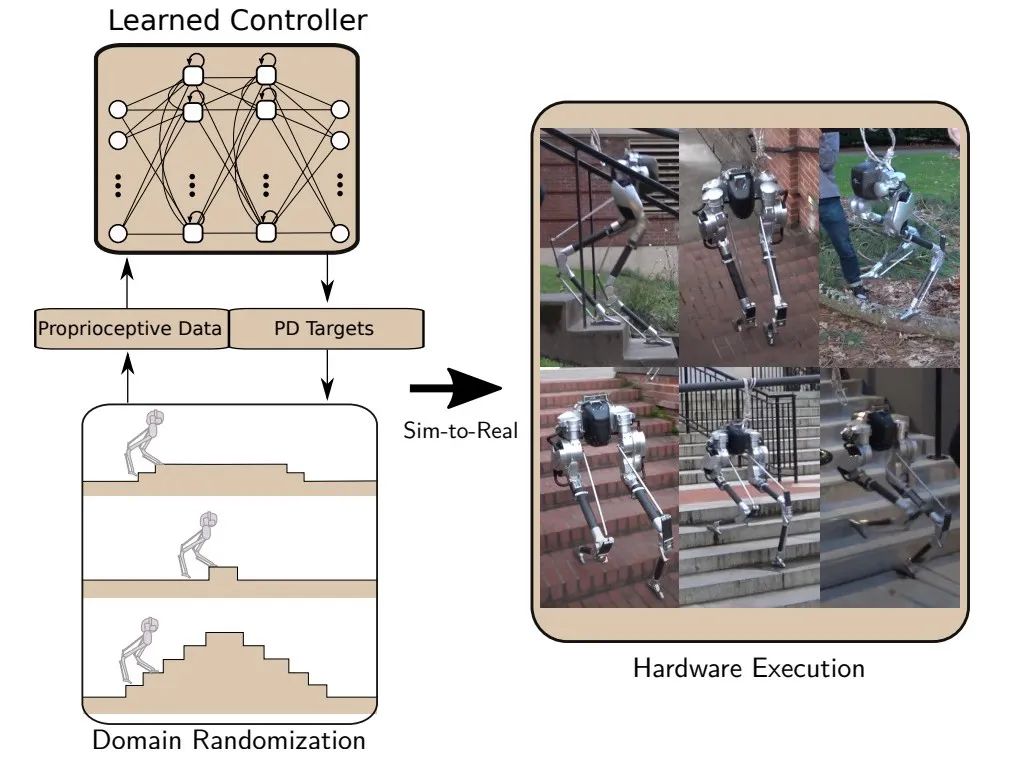
Grâce à l’apprentissage par renforcement, les robots bipèdes peuvent être entraînés à simuler et à s’adapter aux changements du sol à différentes hauteurs. De plus, avec seulement de légères modifications au cadre d’apprentissage par renforcement sur terrain plat existant, ils peuvent marcher de manière stable dans les escaliers, sur un terrain accidenté et dans d’autres scénarios.
Il convient de mentionner que, qu’il s’agisse de scènes de jogging ou d’escaliers, Cassie s’appuie entièrement sur la conduction de l’énergie cinétique des membres inférieurs pour les calculs de mouvement sans apport visuel.
Des robots bipèdes, plus proches des humains
Le robot familier à quatre pattes, le chien robot de Boston Dynamics, célèbre sur Internet, a trouvé avec succès des scénarios d'utilisation au cours des dernières années en courant, en sautant, en montant et en descendant les escaliers, et même en sautant à la corde et en dansant.
Mais comparés aux robots quadrupèdes qui sont souvent conçus pour ressembler à des animaux, les robots bipèdes ont une apparence plus humaine et sont plus proches des humains dans leur fonction.

Les humains marchent en envoyant des commandes au cerveau, qui pousse chaque articulation à effectuer le mouvement. Les robots bipèdes doivent simuler les hanches et les pieds humains pour soutenir la marche et la stabilité du robot. Ce n’est qu’en comprenant pleinement les caractéristiques dynamiques du robot que nous pouvons le conduire à effectuer des mouvements efficaces et complexes.
La dynamique de la série de robots Cassie est basée sur la démarche des oiseaux, en particulier des autruches. Les hanches de Cassie sont conçues avec plusieurs angles libres, mais les genoux ne peuvent se plier que dans une seule direction. Les chevilles sont conçues pour être flexibles et solides. La forme générale est très légère et permet de réduire les vibrations de manière relativement naturelle, semblable à la façon dont les humains marchent.
L'équipe Agility Robotics du Dynamic Robotics Laboratory de l'Université de l'Oregon jouit d'une réputation de longue date dans le monde de la robotique.Ils ont commencé à développer la série de robots bipèdes Cassie en 2017, et après avoir testé plusieurs versions, ils ont obtenu de nombreux résultats jusqu'à présent. Ils ont récemment reçu un financement de recherche d’un million de dollars de la part de la DARPA.
L'équipe a déclaré que le succès de ce jogging de cinq kilomètres sans charge leur a donné une grande confiance et qu'ils continueront à transformer et à améliorer la technologie de Cassie à l'avenir pour entrer dans des scénarios d'application tels que la logistique et la distribution.
source:
– Site officiel de l'Université d'État de l'Oregon : Un robot bipède développé à l'Université d'État de l'Oregon entre dans l'histoire en apprenant à courir et en parcourant 5 km
– Vidéo YouTube « Le robot bipède de l’OSU est le premier à courir 5 km »